Reductor de engranajes helicoidales VRV030 | Reemplazo para Ondrives Rino P15, IP67

Reductor de tornillo sin fin de precisión VRV030, peso 0,15 kg, velocidad máxima de entrada 3000 rpm, lubricado con grasa Shell Gadus S5. Seis relaciones de transmisión de 6,666:1 a 80:1. Tres clases de precisión de holgura: estándar (≤0,50°), A (≤0,13°) y AR (≤0,066°), con datos completos de eficiencia e inercia reflejada por relación. Reemplazo dimensionalmente compatible para las series Ondrives y Rino P15.
Reductor de engranajes helicoidales de precisión VRV030
El VRV030 es un instrumento de precisión en miniatura. reductor de engranajes helicoidales Diseñado para accionamientos de alta precisión en espacios reducidos, ideal para robótica industrial, sistemas de seguimiento solar y equipos militares. Con un peso de tan solo 0,15 kg en su versión más compacta, la unidad admite velocidades de entrada de hasta 3000 rpm y viene lubricada con grasa Shell Gadus S5 V4P 2.5 de serie, lo que elimina la necesidad de controlar el nivel de aceite que requieren las unidades con baño de aceite en configuraciones donde la malla quedaría expuesta intermitentemente.
Para cada relación, se ofrecen tres clases de precisión de holgura: estándar (holgura de salida ≤0,50°), clase A (≤0,13°) y clase AR (≤0,066°). Este sistema de tres niveles relaciona directamente el requisito de precisión con el coste de la pieza: un accionamiento de posicionamiento de paneles solares que tolera una holgura de 0,30° puede utilizar la clase estándar; un brazo robótico que requiere un microposicionamiento repetible debe especificar la clase AR. A continuación, se presenta en una tabla la información completa sobre holgura, eficiencia e inercia reflejada para cada relación y clase.
El VRV030 es un reductor de engranajes helicoidales compatible dimensionalmente con la serie P15 de Ondrives & Rino. Korea Ever-Power fabrica el VRV030 como una alternativa para el mercado de repuestos, no como una pieza original del fabricante. Para obtener componentes originales de Ondrives & Rino, contacte con el fabricante original. Si busca un reductor compatible a un precio competitivo con las mismas prestaciones, el VRV030 se instala directamente sin modificaciones.
Especificaciones técnicas
La tabla de especificaciones que aparece a continuación abarca los parámetros mecánicos, de lubricación y de carga aplicables a todas las variantes del VRV030. La tabla de relación/eficiencia/inercia que se muestra a continuación proporciona datos de rendimiento por relación para cada clase de holgura; utilice ambas al verificar la idoneidad y al redactar las especificaciones de compra.
| Especificación | Valor |
|---|---|
| Peso | 0,15 kg (cuadro P15) |
| Velocidad de entrada nominal [S1 T₂n] n1nom | 1.000 min⁻¹ (r/min) |
| Velocidad máxima de entrada n1max | 3.000 min⁻¹ (r/min) |
| Lubricación | Grasa — Shell Gadus S5 V4P 2.5 |
| Temperatura máxima de funcionamiento | ≈ 60 °C |
| Carga radial de entrada máxima Fr1 | 10 N |
| Carga radial de salida máxima Fr2 | 80 N |
| Carga axial de salida máxima Fa2 | 30 N |
Tabla de relación, eficiencia, juego e inercia de la serie P15
Sufijos del número de pieza: estándar = juego de salida ≤0,50°; A = ≤0,13° (juego reducido); Arkansas = ≤0,066° (juego de precisión). Eficiencia (ηz) medida a velocidad de entrada nominal. Inercia reflejada en la entrada en kg·m². Todas las direcciones de avance: Derecha.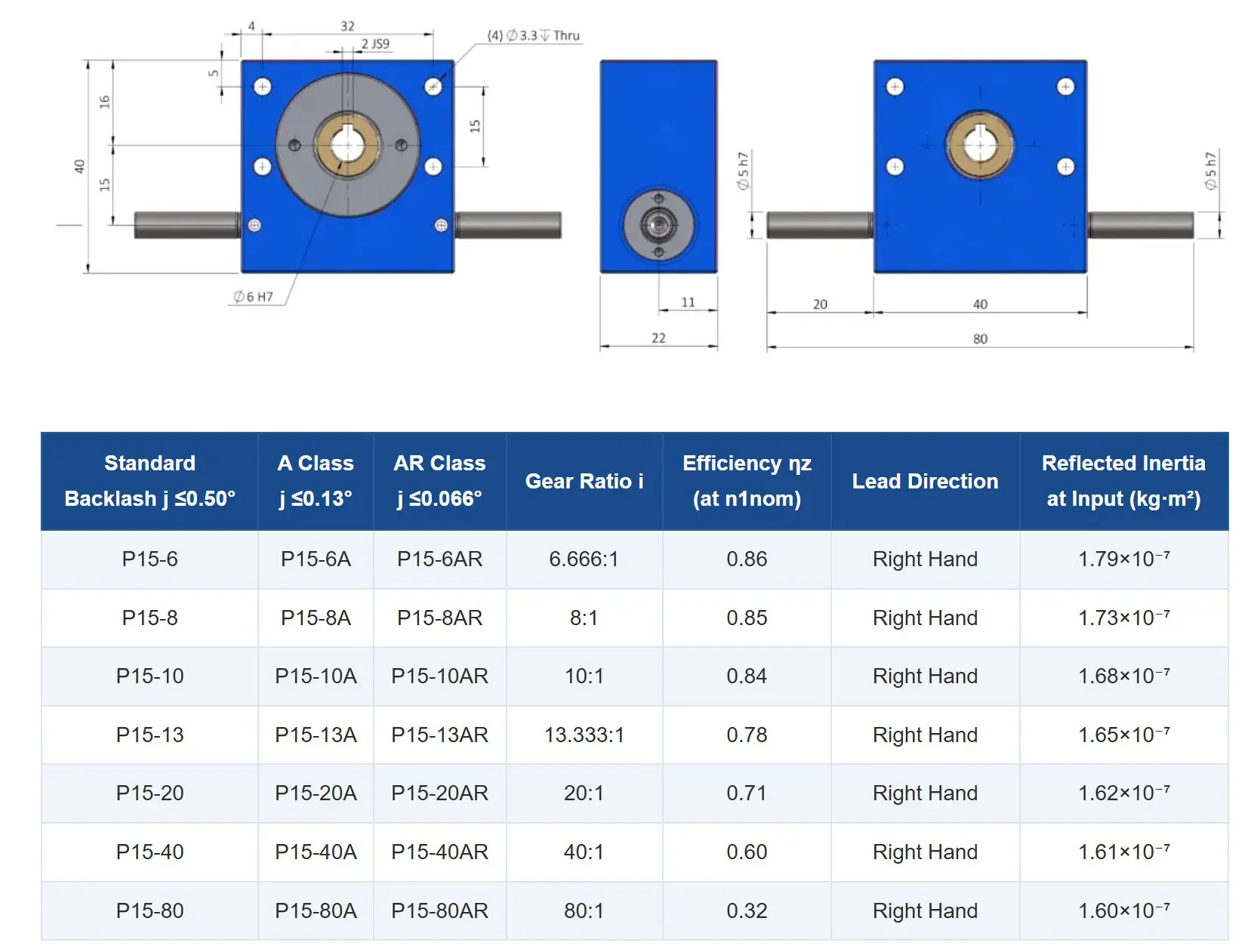
Nota: Es necesario realizar pruebas en su aplicación. Confirme los ciclos de trabajo y la idoneidad con sus propios cálculos. Los valores indicados son solo orientativos. Puede ser necesario el enfriamiento según el ciclo de trabajo de la aplicación y la temperatura ambiente.
Selección de la clase de holgura adecuada
La holgura en un engranaje helicoidal es el juego angular en el eje de salida cuando el eje de entrada permanece fijo. Una menor holgura implica mayor repetibilidad de posición al invertir el sentido de giro, pero también conlleva tolerancias de fabricación más estrictas, periodos de rodaje más cortos y un mayor coste unitario. Especificar una clase de holgura más ajustada de la que requiere la aplicación supone un gasto innecesario; especificar una holgura excesiva genera errores de posición que los sistemas de control deben compensar electrónicamente.
| Clase | Reacción adversa en la salida | Aplicación típica | Costo relativo |
|---|---|---|---|
| Estándar | ≤ 0,50° | Accionamientos unidireccionales; seguidores solares que no invierten su sentido de giro bajo carga; indexación de transportadores con corrección de retroalimentación de posición. | Más bajo |
| A | ≤ 0,13° | Articulaciones de brazos robóticos que requieren posicionamiento repetible al invertir su sentido de giro; accionamientos de orientación de antenas; dosificación industrial de precisión. | Medio |
| Arkansas | ≤ 0,066° | Brazos robóticos de alta precisión; sistemas ópticos militares; accionamientos de azimut para telescopios; equipos de microdosificación e inspección. | Máximo |
Como guía práctica: si su controlador de servomotor compensa electrónicamente el juego y está conduciendo en una dirección predominante, la clase Estándar suele ser suficiente. Si requiere una repetibilidad de posicionamiento mecánico real al invertir la dirección, como en una articulación robótica que regresa a un punto de referencia, especifique la clase A o AR según su margen de error angular. Las cifras de eficiencia en la tabla muestran que las clases más estrictas no reducen significativamente la eficiencia de salida (compare 0,86 en la clase estándar 6,666:1 con el mismo valor en la clase AR); la diferencia de eficiencia con la misma relación entre clases es insignificante.
Puntos fuertes del diseño VRV030

✦ Tres clases de Backlash: ajuste la precisión a su presupuesto
Las clases Estándar, A y AR cubren todo el rango de precisión, desde el posicionamiento general hasta la robótica de alta precisión, todo en la misma carcasa. Seleccionar la clase adecuada evita especificar una precisión excesiva donde no es necesaria y una precisión insuficiente donde sí lo es.
✦ Lubricación con grasa: independiente de la orientación
La lubricación con grasa Shell Gadus S5 elimina la necesidad de controlar el nivel de aceite y las limitaciones de orientación en la posición del mismo. El VRV030 puede montarse en cualquier posición (horizontal, vertical, invertida o inclinada) sin preocuparse por el desplazamiento del depósito de aceite. Esto es fundamental para las articulaciones de brazos robóticos que giran en cualquier dirección.
✦ Entrada máxima de 3000 rpm — Compatible con servomotores de alta velocidad
La velocidad máxima de entrada de 3000 rpm es compatible con el acoplamiento directo del servomotor sin etapa de reducción primaria. Un servomotor de CC sin escobillas que funciona a 2000 rpm con un VRV030 de 20:1 proporciona una velocidad de salida de 100 rpm, una configuración común en articulaciones robóticas y sistemas de inclinación de paneles solares.
✦ Carcasa fundida de una sola pieza — Alineación integral
La carcasa moldeada de una sola pieza mantiene la alineación entre el tornillo sin fin y la rueda sin necesidad de calces ni dispositivos de alineación externos. Este es el mismo principio de diseño que se utiliza en las cajas de engranajes de precisión de alta gama, pero a una fracción del costo: el método de perforación en una sola configuración garantiza el paralelismo del eje y la concentricidad del asiento del cojinete dentro de las tolerancias de la fundición de la carcasa.
✦ Datos de eficiencia publicados por ratio
Muchos proveedores de reductores en miniatura publican un único valor de eficiencia para toda la gama. La tabla VRV030 muestra la eficiencia medida para cada relación de transmisión, desde 0,86 a 6,666:1 hasta 0,32 a 80:1. Esto es importante para el dimensionamiento térmico del motor: un servomotor con una relación de 80:1 debe suministrar el triple de potencia de entrada para realizar el mismo trabajo de salida que uno con una configuración de 6,666:1.
✦ Datos de inercia reflejada: referencia para el ajuste del servomotor
La inercia reflejada en la entrada (aproximadamente 1,60–1,79 × 10⁻⁷ kg·m²) se publica para cada relación. Este valor es esencial para el ajuste de ganancia del servomotor: el ingeniero de control necesita saber cuánta inercia de carga percibe el motor en su eje, que es la inercia de carga ÷ relación² más la inercia reflejada de la caja de engranajes. Para los servomotores de alta velocidad, esta distinción es importante.
Aplicaciones principales
▸ Robótica industrial: accionamientos de articulaciones y efectores finales

Las articulaciones de muñeca de brazos robóticos, los actuadores de cambio de herramientas y los accionamientos de manipulación de piezas suelen requerir engranajes compactos de alto par en cualquier orientación. La lubricación por grasa del VRV030 permite cualquier ángulo de montaje; su velocidad de entrada de 3000 rpm y sus tres clases de holgura cubren tanto movimientos de barrido de alta velocidad (relación más baja, clase estándar) como articulaciones de posicionamiento de precisión (relación más alta, clase A o AR). Con una relación de 20:1 y una eficiencia de 0,71, un servomotor de 50 W proporciona aproximadamente 35 W de potencia mecánica de salida, suficiente para una pinza compacta o un actuador de muñeca en un robot de manipulación.
▸ Energía solar: seguimiento de paneles y accionamientos azimutales

Los seguidores solares de un eje y de doble eje requieren un ajuste preciso del ángulo del panel tanto en elevación como en acimut. El accionamiento debe mantener la posición del panel bajo carga de viento cuando no se le da órdenes; con relaciones de 20:1 o superiores, el VRV030 es autobloqueante (la eficiencia de 0,71 para 20:1 supera el umbral de autobloqueo, pero con 40:1 con una eficiencia de 0,60 y 80:1 con una eficiencia de 0,32, se aplica el autobloqueo práctico). La clase de holgura estándar suele ser suficiente para el seguimiento solar; la tolerancia del ángulo del panel de la mayoría de los sistemas fotovoltaicos es varias veces mayor que la cifra estándar de 0,50°.
▸ Equipos ópticos militares, de vigilancia y de precisión
Los actuadores de dirección de vehículos no tripulados, los mecanismos de apuntamiento de antenas y los sistemas de posicionamiento de sensores electroópticos requieren compacidad y un posicionamiento angular preciso y repetible. El VRV030 AR, con una relación de 10:1 o 13,333:1 y una holgura inferior a 0,066°, ofrece estas características en una carcasa de tan solo 0,15 kg. La inercia reflejada publicada permite a los ingenieros de servoaccionamientos modelar con precisión la dinámica del sistema durante el diseño del bucle de control, requisito indispensable para la documentación de verificación que suelen exigir las empresas de adquisición de equipos militares.
Guía de reemplazo de Ondrives y Rino P15
El VRV030 se fabrica como un repuesto compatible para el reductor de engranajes helicoidales Ondrives & Rino P15. Korea Ever-Power no está afiliada ni autorizada por Ondrives & Rino; el VRV030 es un producto independiente diseñado para ser compatible en dimensiones y rendimiento como un reemplazo directo. Para obtener componentes originales de Ondrives & Rino, póngase en contacto con el fabricante.
| Punto de control | Ondrives y Rino P15 | VRV030 | ¿Compatible? |
|---|---|---|---|
| Serie de productos / marco | P15 | VRV030 | ✓ Misma clase de marco |
| Relaciones disponibles | 6.666, 8, 10, 13.333, 20, 40, 80 | 6.666, 8, 10, 13.333, 20, 40, 80 | ✓ Partido completo |
| Clases de reacción | Estándar / A / AR | Estándar / A / AR | ✓ Partido completo |
| Velocidad de entrada nominal | 1.000 rpm | 1.000 rpm | ✓ Coincidencia |
| Velocidad máxima de entrada | 3.000 rpm | 3.000 rpm | ✓ Coincidencia |
| Lubricación | Grasa | Shell Gadus S5 V4P 2.5 | ✓ Grado compatible |
| Carga radial de salida máxima Fr2 | 80 N | 80 N | ✓ Coincidencia |
| Fabricantes de equipos originales (OEM) / Mercado de repuestos | Pieza original del fabricante | reemplazo del mercado de repuestos | — Verificar para su solicitud |
Recomendamos probar el VRV030 en su aplicación específica antes de comprometerse con el reemplazo de toda la flota. Los planos dimensionales y las especificaciones completas están disponibles a solicitud a través de Corea Ever-Power Para confirmar la compatibilidad antes de realizar su primer pedido.
Componentes de transmisión compatibles
La caja de engranajes VRV030 es un componente de un conjunto de accionamiento de precisión. Las características de desgaste de la rueda helicoidal, el grado de precisión del eje helicoidal y el tipo de acoplamiento del motor influyen en la precisión de posicionamiento a largo plazo del sistema. Korea Ever-Power suministra el conjunto completo de componentes para esta familia de cajas de engranajes.

⚙ Rueda helicoidal — gusanorueda de gusano.top
Ruedas helicoidales de precisión para el bastidor VRV030, fabricadas para coincidir con la distancia entre centros y el perfil de los dientes de las clases de juego estándar, A y AR. Indique la relación y la clase de juego al realizar su consulta; confirmaremos el perfil y las especificaciones de acabado superficial que determinan a qué clase pertenece la rueda de repuesto.
⚙ Eje del gusano — engranaje de rueda helicoidal.top
Rectifique los ejes sin fin con la tolerancia requerida para la especificación de juego A o AR. El rectificado de precisión según la norma DIN 3974, con la precisión adecuada, determina el grado de juego final. Una mayor precisión en el perfil del eje sin fin es uno de los dos factores principales (junto con la precisión del perfil de la rueda) para lograr la clasificación AR.
⚙ Acoplamientos de eje
Para servomotores de precisión mediante el VRV030, los acoplamientos de viga o fuelle sin holgura son la conexión estándar del lado de entrada entre el eje del servomotor y el orificio de entrada de la caja de engranajes. Deben evitarse los acoplamientos de mordaza con arañas de poliuretano estándar en aplicaciones de clase AR, ya que la flexibilidad de la araña añade juego angular, lo que reduce la ventaja de la holgura que ofrece la clase de engranajes de precisión.
Preguntas frecuentes
¿Cómo elijo entre las clases de retroceso Standard, A y AR?
→ Identifique el margen de error angular de su aplicación para un único movimiento de posicionamiento seguido de inversión. Si su sistema puede tolerar hasta 0,5° de zona muerta en el cambio de dirección (gestionado por el controlador), la clase Estándar es suficiente. Para una repetibilidad mecánica dentro de 0,13° sin compensación del controlador, especifique la clase A. Para AR, el juego es lo suficientemente pequeño como para que la mayoría de los controladores de servo puedan realizar el seguimiento durante la inversión de dirección dentro de su ganancia de bucle de posición normal; especifique AR para telescopios, óptica de precisión y articulaciones robóticas de alta precisión.
¿El VRV030 es realmente autoblocante y qué relaciones de transmisión cumplen con los requisitos?
→ Con una relación de 40:1 (eficiencia de 0,60) y 80:1 (eficiencia de 0,32), el VRV030 se autobloquea eficazmente en condiciones estáticas: el ángulo de avance es inferior al ángulo de fricción de la malla lubricada con grasa. Con una relación de 20:1 (eficiencia de 0,71) o inferior, es posible el retroceso con una carga de salida suficiente. Para sistemas de posicionamiento solar y de antenas que deben mantener la posición bajo carga de viento, especifique una relación de 40:1 o 80:1. Verifique siempre el autobloqueo en su aplicación específica: la temperatura de funcionamiento, las condiciones de lubricación y la vibración pueden afectar el ángulo de fricción en la práctica.
¿Cuál es el par máximo de salida con una relación de 10:1?
→ El par máximo de salida depende de la potencia del motor en la entrada. El VRV030 a 10:1 tiene una eficiencia de 0,84, por lo que el par de salida = (potencia de entrada × eficiencia × 60) ÷ (2π × velocidad de salida en rpm). Con una entrada nominal de 1000 rpm y un motor de 10 W: par de salida ≈ (10 W × 0,84 × 60) ÷ (2π × 100 rpm) ≈ 0,8 Nm. El par de salida continuo máximo está limitado por el límite térmico de la carcasa y la carga radial máxima de salida Fr2 = 80 N; confirme que su combinación de carga no exceda ambos límites simultáneamente.
¿Puede el VRV030 funcionar continuamente a 3000 rpm de entrada?
→ 3000 rpm es la velocidad máxima de entrada nominal, no la velocidad de funcionamiento continuo a plena carga. A 3000 rpm, debe verificarse que la película de lubricación de grasa sea adecuada para las condiciones del cojinete del eje de entrada. Para funcionamiento continuo por encima de 2000 rpm, confirme con Korea Ever-Power que su ciclo de trabajo y combinación de carga específicos se encuentran dentro de los límites térmicos y de lubricación del llenado de grasa.
¿El VRV030 requiere un acoplamiento de motor aparte o puedo montar el motor directamente?
→ El VRV030 admite un servomotor o un motor paso a paso directamente en el orificio de entrada; esta unidad no tiene brida para el motor. Se requiere un acoplamiento entre el eje del motor y el orificio de entrada de la caja de engranajes. Para aplicaciones de precisión de clase AR, utilice un acoplamiento de viga o fuelle sin juego. Para aplicaciones estándar y de clase A, se puede utilizar un acoplamiento de mordaza estándar con una araña de poliuretano blando, pero tenga en cuenta que la araña añade una pequeña cantidad de flexibilidad angular que contribuye al juego efectivo del sistema.
¿Cambia el valor de inercia reflejada entre las unidades de clase estándar y las de clase AR?
→ No. La inercia reflejada depende de la geometría del engranaje (número de dientes, distancia entre centros, material) y no varía entre las clases de juego. Los valores de 1,60–1,79 × 10⁻⁷ kg·m² que aparecen en la tabla se aplican a las tres clases con la misma relación. La distinción de clases afecta únicamente a la tolerancia de fabricación del engranaje, no a la distribución de masa física de los componentes giratorios.
Lo que dicen los clientes
Kim Hyun-wooIngeniero en Robótica, Seoul Automation Systems (2024)
Se sustituyeron las unidades Ondrives P15-20A en la articulación de la muñeca de un robot manipulador. La holgura de la VRV030-20A, probada, fue de 0,11°, dentro de la especificación de clase A de ≤0,13°. El comportamiento del bucle del servomotor tras la sustitución fue idéntico al de la pieza original. Se ahorró 40% en el coste unitario en comparación con la pieza original.
Parque Sang-ilIngeniero mecánico, fabricante de equipos solares de Daejeon (tercer trimestre de 2024)
Utilizamos el VRV030 con una relación estándar de 40:1 en los accionamientos de azimut de nuestros seguidores solares de un solo eje. La eficiencia de 0,60 a esa relación implica que el motor sea un poco más grande que uno con engranajes helicoidales, pero el autobloqueo a 40:1 elimina la necesidad de un freno independiente y simplifica el sistema eléctrico. Llevamos 180 unidades en funcionamiento sin fallos en los engranajes durante 18 meses.
Choi Byung-junIngeniero de Control, Integrador de Sistemas de Defensa de Busan (2025)
"Clase AR especificada para una aplicación de apuntamiento de antena. Se midió una holgura de 0,05° en el primer lote, mejor que la especificación de ≤0,066°. Los datos de inercia reflejada en la especificación fueron fundamentales para nuestra documentación de puesta en marcha del servomotor. El producto se entregó con certificación dimensional completa."
Lee Jun-seokIngeniero de Compras, Gyeonggi-do Precision Equipment Co. (cuarto trimestre de 2024)
"La tabla de eficiencia por relación fue lo que nos convenció de probar a este proveedor. Muy pocos fabricantes de reductores de tornillo sin fin publican datos de eficiencia por relación a esta escala. La eficiencia de 0,32 a 80:1 es exactamente lo que necesitábamos para el control térmico de nuestro sistema de servoaccionamiento."
Yoon Gi Tae, Integrador de automatización, Incheon (2024)
"Utilizamos VRV030 con una relación de lubricación de 13,333:1 (clase A) para el eje de posicionamiento de una máquina dispensadora. La lubricación con grasa representa una ventaja práctica, ya que elimina cualquier preocupación sobre el nivel de aceite al reorientar la máquina para diferentes formatos de producto. El costo de reemplazo en comparación con el del fabricante original fue lo suficientemente atractivo como para calificar y aprobar el producto dentro de un ciclo de producción."
Han Soo-yeonComprador técnico, proveedor de equipos de investigación de Seúl (finales de 2024)
"Pedimos un motor de clase estándar 8:1 para la platina de un microscopio; no es una aplicación típica de robótica o energía solar, pero su tamaño compacto y su movimiento suave eran justo lo que necesitábamos. La entrega se realizó en 5 días hábiles. No hemos tenido ningún problema después de 8 meses de uso en el laboratorio."
Información adicional
| Editor | Cxm |
|---|
Productos relacionados
-

Reductor de engranajes helicoidales con entrada de eje EP-NRV | Entrada de eje sólido
-

Reductor de engranajes helicoidales WPWDKO | Eje con doble chaveta + Salida vertical
-

Reductor de engranajes helicoidales de eje vertical WPWKO | Salida hacia abajo del eje
-

Reductor de engranajes helicoidales de doble etapa WPEX | Accionamiento de dos etapas
-

Reductor de engranajes helicoidales de doble entrada EP-NMRV-VS | Accionamiento síncrono y extensión de codificador
-

Reductor de engranajes helicoidales VRV030 | Reemplazo para Ondrives Rino P70
-

Reductor de engranajes helicoidales VRV030 | Reemplazo para Ondrives Rino P45
-

Reductor de engranajes helicoidales WPWO | 19–2745 Nm, 0,12–33,2 kW Universal

























