VRV030 Wormwielreductor | Vervanging voor Ondrives Rino P15, IP67

VRV030 precisie wormwieloverbrenging, gewicht 0,15 kg, maximale ingangssnelheid 3.000 tpm, gesmeerd met Shell Gadus S5 vet. Zes overbrengingsverhoudingen van 6,666:1 tot 80:1. Drie nauwkeurigheidsklassen voor speling — standaard (≤0,50°), A (≤0,13°), AR (≤0,066°) — met volledige efficiëntie- en gereflecteerde inertiegegevens per overbrengingsverhouding. Dimensionaal compatibel vervangingsonderdeel voor Ondrives & Rino P15-serie.
VRV030 Precisie wormwielreductor
De VRV030 is een miniatuur precisie-instrument. wormwielreductor Ontworpen voor uiterst nauwkeurige aandrijvingen in compacte ruimtes, zoals in industriële robotica, zonvolgsystemen en militaire apparatuur. De unit weegt slechts 0,15 kg in de kleinste uitvoering, accepteert ingangssnelheden tot 3000 tpm en is standaard gesmeerd met Shell Gadus S5 V4P 2.5 vet. Dit elimineert de noodzaak voor oliepeilcontrole die oliebadunits vereisen bij configuraties waarbij het gaas af en toe blootgesteld zou worden.
Voor elke overbrengingsverhouding zijn drie nauwkeurigheidsklassen voor speling beschikbaar: standaard (uitgangsspeling ≤0,50°), klasse A (≤0,13°) en klasse AR (≤0,066°). Dit drieledige systeem koppelt de precisie-eisen direct aan de kosten van het onderdeel: een aandrijving voor de positionering van zonnepanelen die een speling van 0,30° tolereert, kan de standaardklasse gebruiken; een robotarm die herhaalbare micropositionering vereist, moet klasse AR specificeren. De volledige gegevens over speling, rendement en gereflecteerde inertie voor elke overbrengingsverhouding en klasse zijn hieronder in een tabel weergegeven.
De VRV030 is een dimensionaal compatibel vervangingsonderdeel voor de Ondrives & Rino P15 wormwielreductorenserie. Korea Ever-Power produceert de VRV030 als een aftermarket-alternatief – niet als OEM-onderdeel. Neem voor originele Ondrives & Rino-onderdelen contact op met de oorspronkelijke fabrikant. De VRV030 is een direct te monteren, kosteneffectief en compatibel vervangingsonderdeel met dezelfde prestaties.
Technische specificaties
De onderstaande specificatietabel bevat de mechanische, smeer- en belastingsparameters die van toepassing zijn op alle VRV030-varianten. De tabel met verhoudingen/rendementen/traagheidsmomenten die volgt, geeft prestatiegegevens per verhouding voor elke spelingklasse. Gebruik beide tabellen bij het controleren van de geschiktheid en het opstellen van uw aankoopspecificatie.
| Specificatie | Waarde |
|---|---|
| Gewicht | 0,15 kg (P15 frame) |
| Nominale ingangssnelheid [S1 T₂n] n1nom | 1.000 min⁻¹ (r/min) |
| Maximale invoersnelheid n1max | 3.000 min⁻¹ (r/min) |
| Smering | Vet — Shell Gadus S5 V4P 2.5 |
| Maximale bedrijfstemperatuur | ≈ 60°C |
| Maximale radiale ingangsbelasting Fr1 | 10 N |
| Maximale radiale belasting Fr2 | 80 N |
| Maximale axiale uitgangsbelasting Fa2 | 30 N |
Tabel met verhoudingen, rendement, speling en inertie van de P15-serie
Achtervoegsels voor onderdeelnummers: standaard = speling aan de uitgang ≤0,50°; A = ≤0,13° (verminderde speling); AR = ≤0,066° (precisie-speling). Rendement (ηz) gemeten bij nominale ingangssnelheid. Weerspiegelde inertie bij ingang in kg·m². Alle aanlooprichtingen: Rechtsdraaiend.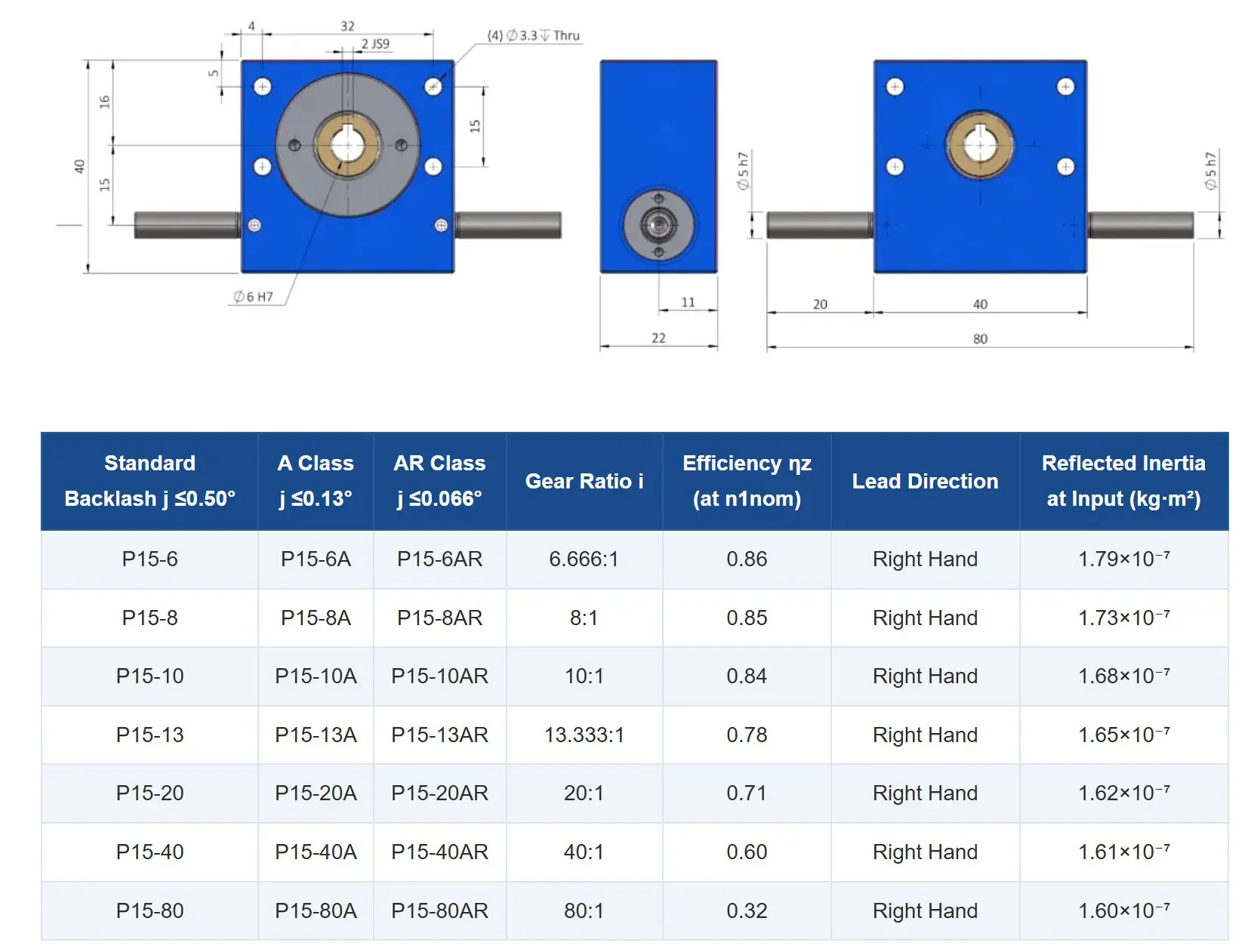
Let op: testen in uw toepassing is noodzakelijk. Bevestig de inschakelduur en geschiktheid met uw eigen berekeningen. De vermelde waarden zijn slechts indicatief. Koeling kan nodig zijn, afhankelijk van de inschakelduur van de toepassing en de omgevingstemperatuur.
De juiste backlash-klasse selecteren
Speling in een wormwieloverbrenging is de hoekafwijking van de uitgaande as wanneer de ingaande as stilstaat. Minder speling betekent een grotere positionele herhaalbaarheid bij het omkeren van de draairichting, maar ook kleinere productietoleranties, kortere inlooptijden en hogere productiekosten. Het specificeren van een kleinere tolerantieklasse dan uw toepassing vereist, is een onnodige kostenpost; een te grote tolerantieklasse creëert positioneringsfouten die elektronisch moeten worden gecompenseerd door de besturingssystemen.
| Klas | Speling bij de uitgang | Typische toepassing | Relatieve kosten |
|---|---|---|---|
| Standaard | ≤ 0,50° | Aandrijvingen in één richting; zonnevolgsystemen die niet omkeren onder belasting; transportbandpositionering met positiecorrectie. | Laagste |
| A | ≤ 0,13° | Robotarmgewrichten die een herhaalbare positionering bij omkering vereisen; antenne-richtaandrijvingen; precisie-industriële dosering | Medium |
| AR | ≤ 0,066° | Zeer nauwkeurige robotarmen; militaire optische systemen; azimut-aandrijvingen voor telescopen; microdoseer- en inspectieapparatuur. | Hoogste |
Als praktische richtlijn: als uw servocontroller speling elektronisch compenseert en u in één dominante richting rijdt, is de standaardklasse meestal voldoende. Als u echte mechanische positioneringsnauwkeurigheid bij richtingsomkering vereist – zoals bij een robotgewricht dat terugkeert naar een referentiepunt – kies dan klasse A of AR, afhankelijk van uw tolerantie voor hoekfouten. De efficiëntiecijfers in de tabel laten zien dat nauwere klassen de outputefficiëntie niet significant verminderen (vergelijk 0,86 bij 6,666:1 standaard met dezelfde waarde bij klasse AR) – het efficiëntieverschil tussen de klassen bij dezelfde verhouding is verwaarloosbaar.
Sterke punten van het VRV030-ontwerp

✦ Drie soorten speling — Pas de precisie aan uw budget aan
De klassen Standard, A en AR bestrijken het volledige precisiebereik, van algemene positionering tot uiterst nauwkeurige robotica, in dezelfde behuizing. Door de juiste klasse te kiezen, voorkomt u dat de precisie te hoog wordt gespecificeerd waar dat niet nodig is en te laag waar het wel belangrijk is.
✦ Vet smering — Oriëntatie-onafhankelijk
Dankzij de Shell Gadus S5-vet smering hoeft er geen oliepeil in de gaten gehouden te worden en zijn er geen beperkingen qua oliepositie of -oriëntatie. De VRV030 kan in elke positie worden gemonteerd – horizontaal, verticaal, ondersteboven of onder een hoek – zonder dat er problemen ontstaan met de verplaatsing van de olie. Dit is cruciaal voor robotarmgewrichten die in willekeurige richtingen kunnen draaien.
✦ Maximaal ingangsvermogen van 3000 tpm — Compatibel met hogesnelheidsservo's
De maximale ingangssnelheid van 3000 tpm is compatibel met directe servomotorkoppeling zonder primaire reductietrap. Een borstelloze DC-servomotor die draait op 2000 tpm met een VRV030-overbrenging van 20:1 levert een uitgangssnelheid van 100 tpm – een veelvoorkomende configuratie in robotgewrichten en kantelaandrijvingen voor zonnepanelen.
✦ Behuizing uit één stuk gegoten — Integraal uitgelijnd
De uit één stuk gegoten behuizing zorgt voor een perfecte uitlijning van de wormwieloverbrenging zonder dat er vulplaatjes of externe uitlijningshulpmiddelen nodig zijn. Dit is hetzelfde ontwerpprincipe dat wordt gebruikt in hoogwaardige precisie-versnellingsbakken, maar dan tegen een fractie van de kosten. De methode waarbij de boring in één keer wordt uitgevoerd, garandeert de paralleliteit van de as en de concentriciteit van de lagerzittingen binnen de toleranties van het gegoten onderdeel.
✦ Efficiëntiegegevens gepubliceerd per ratio
Veel leveranciers van miniatuurversnellingsbakken publiceren één rendementscijfer voor het hele assortiment. De VRV030-tabel vermeldt het gemeten rendement voor elke verhouding — van 0,86 bij 6,666:1 tot 0,32 bij 80:1. Dit is belangrijk voor de thermische dimensionering van de motor: een servomotor met een verhouding van 80:1 moet driemaal zoveel ingangsvermogen leveren voor dezelfde uitgangskracht in vergelijking met de configuratie met een verhouding van 6,666:1.
✦ Gegevens over gereflecteerde traagheid — Referentie voor servo-afstelling
De gereflecteerde inertie aan de ingang (ongeveer 1,60–1,79 × 10⁻⁷ kg·m²) wordt voor elke verhouding gepubliceerd. Deze waarde is essentieel voor het afstellen van de servomotorversterking: de regeltechnicus moet weten hoeveel belastingsinertie de motor op zijn as ondervindt, namelijk de belastingsinertie ÷ verhouding² plus de gereflecteerde inertie van de versnellingsbak. Voor snelle servoregelingen is dit onderscheid van belang.
Primaire toepassingen
▸ Industriële robotica — Aandrijvingen voor gewrichten en eindeffectoren

De polsgewrichten van robotarmen, gereedschapswisselaars en aandrijvingen voor het manipuleren van onderdelen vereisen vaak compacte tandwieloverbrengingen met een hoog koppel in willekeurige posities. De VRV030 is dankzij de vetsmering geschikt voor elke montagehoek; de ingangssnelheid van 3000 tpm en de drie spelingklassen dekken zowel snelle zwenkbewegingen (lagere overbrengingsverhouding, standaardklasse) als precisiepositioneringsgewrichten (hogere overbrengingsverhouding, A- of AR-klasse). Met een overbrengingsverhouding van 20:1 en een rendement van 0,71 levert een 50W servomotor ongeveer 35W mechanisch vermogen – voldoende voor een compacte grijper of polsactuator in een handlingrobot.
▸ Zonne-energie — Paneelvolging en azimut-aandrijvingen

Zowel enkelassige als dubbelassige zonnevolgsystemen vereisen een nauwkeurige afstelling van de paneelhoek in zowel elevatie als azimut. De aandrijving moet de paneelpositie onder windbelasting behouden wanneer er geen aansturing plaatsvindt. Bij verhoudingen van 20:1 en hoger is de VRV030 zelfvergrendelend (de efficiëntie van 0,71 bij 20:1 ligt boven de drempel voor zelfvergrendeling, maar bij 40:1 met een efficiëntie van 0,60 en 80:1 met een efficiëntie van 0,32 is er sprake van praktische zelfvergrendeling). De standaard spelingklasse is doorgaans voldoende voor zonnevolgsystemen; de tolerantie voor de paneelhoek van de meeste PV-systemen is vele malen groter dan de standaard speling van 0,50°.
▸ Militaire, bewakings- en precisie-optische apparatuur
Stuurmechanismen voor onbemande voertuigen, antennerichtmechanismen en elektro-optische sensorpositioneringssystemen vereisen zowel compactheid als nauwkeurige, herhaalbare hoekpositionering. De VRV030 AR-klasse met een overbrengingsverhouding van 10:1 of 13,333:1 — met een speling van minder dan 0,066° — biedt dit in een behuizing van slechts 0,15 kg. De gepubliceerde gereflecteerde inertie stelt servo-aandrijftechnici in staat om de systeemdynamiek nauwkeurig te modelleren tijdens het ontwerp van de regelkring, wat een vereiste is voor de verificatiedocumentatie die doorgaans wordt gevraagd bij de aanschaf van militair materieel.
Ondrives & Rino P15 Vervangingsgids
De VRV030 is een compatibel vervangingsonderdeel voor de Ondrives & Rino P15 wormwielreductor. Korea Ever-Power is niet gelieerd aan of geautoriseerd door Ondrives & Rino — de VRV030 is een onafhankelijk product dat is ontworpen om qua afmetingen en prestaties compatibel te zijn als directe vervanging. Neem voor originele Ondrives & Rino-onderdelen contact op met de fabrikant.
| Controlepunt | Ondrives & Rino P15 | VRV030 | Verenigbaar? |
|---|---|---|---|
| Productserie / frame | P15 | VRV030 | ✓ Dezelfde frameklasse |
| Beschikbare verhoudingen | 6.666, 8, 10, 13.333, 20, 40, 80 | 6.666, 8, 10, 13.333, 20, 40, 80 | ✓ Volledige wedstrijd |
| Tegenreactieklassen | Standaard / A / AR | Standaard / A / AR | ✓ Volledige wedstrijd |
| Nominale ingangssnelheid | 1.000 toeren per minuut | 1.000 toeren per minuut | ✓ Match |
| Maximale invoersnelheid | 3000 toeren per minuut | 3000 toeren per minuut | ✓ Match |
| Smering | Vet | Shell Gadus S5 V4P 2.5 | ✓ Compatibele kwaliteit |
| Maximale radiale uitgangsbelasting Fr2 | 80 N | 80 N | ✓ Match |
| OEM / aftermarket | Origineel onderdeel van de fabrikant | Vervangingsonderdeel van een externe leverancier | — Controleer uw aanvraag |
Wij raden aan de VRV030 in uw specifieke toepassing te testen voordat u overgaat tot vervanging van uw complete vloot. Maattekeningen en volledige specificaties zijn op aanvraag beschikbaar via [contactgegevens]. Korea Ever-Power Om de geschiktheid te controleren vóór uw eerste bestelling.
Op elkaar afgestemde aandrijfcomponenten
De VRV030-tandwielkast is een onderdeel van een precisie-aandrijfsysteem. De slijtage-eigenschappen van het wormwiel, de precisie van de wormas en het type motorkoppeling beïnvloeden allemaal de positioneringsnauwkeurigheid van het systeem op de lange termijn. Korea Ever-Power levert de complete componentenset voor deze tandwielkastfamilie.

⚙ Wormwiel — wormwormwheel.top
Precisiewormwielen voor het VRV030-frame, vervaardigd om te voldoen aan de hartafstand en het tandprofiel van de standaard-, A- en AR-spelingklassen. Vermeld de overbrengingsverhouding en de spelingklasse bij uw aanvraag — wij controleren dan het profiel en de oppervlakteafwerking die bepalen voor welke klasse het vervangende wiel in aanmerking komt.
⚙ Wormas — wormwieloverbrenging.top
Wormasen worden geslepen tot de tolerantieklasse die vereist is voor de spelingspecificatie A of AR. Precisieslijpen volgens DIN 3974 in de juiste nauwkeurigheidsklasse bepaalt de uiteindelijke spelinggraad. Een nauwere profielnauwkeurigheid van de wormas is een van de twee belangrijkste factoren (naast de nauwkeurigheid van het wielprofiel) voor het behalen van de AR-klasse.
⚙ Askoppelingen
Voor precisieservoaandrijvingen via de VRV030 zijn spelingvrije balg- of balkkoppelingen de standaard verbinding aan de ingangszijde tussen de servomotoras en de ingaande boring van de tandwielkast. Klauwkoppelingen met standaard polyurethaan spinnen moeten worden vermeden in AR-klasse toepassingen, omdat de flexibiliteit van de spin hoekspeling introduceert die het spelingvoordeel van de precisietandwielklasse tenietdoet.
Veelgestelde vragen
Hoe kies ik tussen de standaard-, A- en AR-terugslagklassen?
→ Bepaal het hoekfoutbudget van uw toepassing voor een enkele positioneringsbeweging gevolgd door omkering. Als uw systeem een dode zone van maximaal 0,5° bij richtingsverandering kan tolereren (beheerd door de controller), is de standaardklasse voldoende. Voor mechanische herhaalbaarheid binnen 0,13° zonder compensatie van de controller, specificeer klasse A. Bij AR is de speling klein genoeg zodat de meeste servocontrollers de richtingsomkering kunnen volgen binnen hun normale positielusversterking — specificeer AR voor telescopen, precisie-optische systemen en zeer nauwkeurige robotgewrichten.
Is de VRV030 echt zelfvergrendelend en voor welke overbrengingsverhoudingen geldt dit?
→ Bij een overbrengingsverhouding van 40:1 (rendement 0,60) en 80:1 (rendement 0,32) is de VRV030 onder statische omstandigheden effectief zelfvergrendelend — de voorloophoek is kleiner dan de wrijvingshoek van het met vet gesmeerde gaas. Bij een overbrengingsverhouding van 20:1 (rendement 0,71) en lager is terugdraaien mogelijk bij voldoende uitgangsbelasting. Voor aandrijvingen voor zonne-energie en antennepositionering die hun positie moeten behouden onder windbelasting, dient u een overbrengingsverhouding van 40:1 of 80:1 te specificeren. Controleer altijd de zelfvergrendeling in uw specifieke toepassing — de bedrijfstemperatuur, de smeringstoestand en trillingen kunnen in de praktijk allemaal van invloed zijn op de wrijvingshoek.
Wat is het maximale uitgangskoppel bij een overbrengingsverhouding van 10:1?
→ Het maximale uitgangskoppel is afhankelijk van het motorvermogen aan de ingang. De VRV030 heeft bij een overbrengingsverhouding van 10:1 een rendement van 0,84, dus het uitgangskoppel = (ingangsvermogen × rendement × 60) ÷ (2π × uitgangstoerental in tpm). Bij een nominaal ingangstoerental van 1000 tpm met een motor van 10 W: uitgangskoppel ≈ (10 W × 0,84 × 60) ÷ (2π × 100 tpm) ≈ 0,8 Nm. Het maximale continue uitgangskoppel wordt beperkt door de thermische limiet van de behuizing en de maximale radiale uitgangsbelasting Fr2 = 80 N — controleer of uw belastingcombinatie beide limieten niet tegelijkertijd overschrijdt.
Kan de VRV030 continu draaien met een ingangstoerental van 3000 rpm?
→ 3000 tpm is het nominale maximale ingangstoerental, niet het continu bedrijf bij volledige belasting. Bij 3000 tpm moet worden gecontroleerd of de vetlaag voldoende is voor de lagers van de ingaande as. Voor continu bedrijf boven 2000 tpm dient u bij Korea Ever-Power te controleren of uw specifieke bedrijfscyclus en belastingcombinatie binnen de thermische en smeringslimieten van de vetvulling vallen.
Vereist de VRV030 een aparte motorkoppeling of kan ik de motor direct monteren?
→ De VRV030 accepteert een servo- of stappenmotoras rechtstreeks in de ingangsboring — deze unit heeft geen flensvlak voor de motor. Een koppeling tussen de motoras en de ingangsboring van de versnellingsbak is vereist. Voor precisietoepassingen in de AR-klasse kunt u een spelingvrije balg- of balkkoppeling gebruiken. Voor standaard- en A-klasse toepassingen is een standaard klauwkoppeling met een zachte polyurethaan spin acceptabel, maar houd er rekening mee dat de spin een kleine hoeveelheid hoekverdraaiing toevoegt die bijdraagt aan de effectieve systeemspeling.
Verandert de gereflecteerde traagheidswaarde tussen standaard- en AR-klasse-eenheden?
→ Nee. De gereflecteerde inertie is een functie van de tandwielgeometrie (aantal tanden, hartafstand, materiaal) en verandert niet tussen de verschillende spelingklassen. De waarden van 1,60–1,79 × 10⁻⁷ kg·m² in de tabel gelden voor alle drie de klassen bij dezelfde overbrengingsverhouding. Het onderscheid tussen de klassen heeft alleen invloed op de productietolerantie van de tandwieloverbrenging, niet op de fysieke massaverdeling van de roterende componenten.
Wat klanten zeggen
Kim Hyun-woo, Robotica-ingenieur, Seoul Automation Systems (2024)
"De Ondrives P15-20A-units op het polsgewricht van een handlingrobot zijn vervangen. De VRV030-20A had een speling van 0,11°, wat binnen de A-klasse specificatie van ≤0,13° valt. Het gedrag van de servolus was na vervanging identiek aan dat van het origineel. Dit leverde een kostenbesparing op van 40% ten opzichte van het originele onderdeel."
Park Sang-il, Werktuigbouwkundig ingenieur, Daejeon Solar Equipment OEM (Q3 2024)
"We gebruiken de VRV030 in de standaardklasse met een overbrengingsverhouding van 40:1 voor onze azimut-aandrijvingen van enkelassige zonnevolgsystemen. Het rendement van 0,60 bij die verhouding betekent dat de motor iets groter is dan een spiraalvormige tandwielkast, maar de zelfvergrendelende werking bij 40:1 maakt een aparte rem overbodig en vereenvoudigt het elektrische systeem. We hebben 180 exemplaren in gebruik in 18 maanden tijd, zonder dat er een tandwielkast defect is geraakt."
Choi Byung-jun, Controls Engineer, Busan Defence Systems Integrator (2025)
"Specificatie van de AR-klasse voor een antenne-richttoepassing. Gemeten speling van 0,05° bij de eerste batch — beter dan de specificatie van ≤0,066°. De gereflecteerde inertiegegevens in de specificatie waren cruciaal voor onze servo-inbedrijfstellingsdocumentatie. Het product werd geleverd met volledige maataanduiding."
Lee Jun-seok, Inkoopingenieur, Gyeonggi-do Precision Equipment Co. (Q4 2024)
"De efficiëntietabel per overbrengingsverhouding was doorslaggevend voor onze keuze om deze leverancier te proberen. Er zijn maar weinig leveranciers van wormwieloverbrengingen die efficiëntiegegevens per overbrengingsverhouding op deze schaal publiceren. De efficiëntie van 0,32 bij 80:1 is precies wat we nodig hadden voor de thermische budgettering van ons servoaandrijfsysteem."
Yoon Gi-tae, Automation Integrator, Incheon (2024)
"VRV030 met een overbrengingsverhouding van 13,333:1 (klasse A) gebruikt voor de positioneringsas van een doseermachine. De vetsmering is een praktisch voordeel: geen zorgen over het oliepeil wanneer de machine opnieuw wordt georiënteerd voor verschillende productformaten. De vervangingskosten ten opzichte van de OEM-onderdelen waren zo aantrekkelijk dat de machine binnen één productcyclus werd goedgekeurd."
Han Soo-yeonTechnisch inkoper, Seoul Research Equipment Supplier (eind 2024)
"We bestelden een 8:1 standaard aandrijving voor een microscooptafel – geen typische toepassing voor robotica of zonne-energie, maar het compacte formaat en de soepele beweging waren precies wat we nodig hadden. De levering duurde 5 werkdagen. Na 8 maanden gebruik in het laboratorium hebben we geen problemen ondervonden."
Aanvullende informatie
| Editor | Cxm |
|---|
Gerelateerde producten
-

WPWKT wormwielreductor met koppelarm | Aandrijving op as
-

WPWKO verticale as wormwielreductor | Uitgang naar beneden
-

WPEX tweetraps wormwielreductor | Tweetraps aandrijving
-

VRV030 Wormwielreductor | Vervanging voor Ondrives Rino P70
-

WPWDK Wormwieloverbrenging | WP-serie
-

VRV030 Wormwielreductor | Vervanging voor Ondrives Rino P45
-

WPWO wormwielreductor | 19–2745 Nm, 0,12–33,2 kW universeel
-

Wormwielreductor / Synchrone wormwielmotor voor schroefkrik (RV-serie)

























