VRV030 ウォームギア減速機 | Ondrives Rino P15 代替品、IP67

VRV030精密ウォームギアボックス、重量0.15kg、最大入力回転速度3,000rpm、Shell Gadus S5グリース潤滑。6.666:1から80:1までの6種類のギア比。バックラッシュ精度は、標準(≤0.50°)、A(≤0.13°)、AR(≤0.066°)の3種類。各ギア比ごとに、効率と慣性モーメントのデータが提供されます。OndrivesおよびRino P15シリーズの寸法互換代替品です。
VRV030 精密ウォームギア減速機
VRV030は小型精密 ウォームギア減速機 産業用ロボット、太陽追尾システム、軍事機器など、高精度かつ省スペースが求められる駆動装置向けに設計されています。最小構成では重量0.15kgで、最大3,000rpmの入力速度に対応し、標準でShell Gadus S5 V4P 2.5グリース潤滑方式を採用しているため、メッシュが断続的に露出するような設置環境でも、オイルバス式ユニットに必要な油面管理が不要です。
各比率に対して、バックラッシュ精度は標準(出力バックラッシュ≦0.50°)、Aクラス(≦0.13°)、ARクラス(≦0.066°)の3つのクラスに分類されます。この3段階のシステムにより、精度要件と部品コストが直接対応付けられます。例えば、0.30°の遊びが許容されるソーラーパネル位置決め駆動装置には標準クラスが適していますが、繰り返し可能な微調整が必要なロボットアームにはARクラスを指定する必要があります。各比率および各クラスにおけるバックラッシュ、効率、および反射慣性に関する詳細なデータは、以下の表にまとめられています。
VRV030は、Ondrives & Rino P15ウォームギア減速機シリーズの寸法互換性のある代替品です。韓国のEver-Power社は、VRV030を純正部品ではなく、アフターマーケット向け代替品として製造しています。純正のOndrives & Rino部品については、元の製造元にお問い合わせください。同等の性能データを持つ、コスト競争力のある互換代替品として、VRV030はそのまま取り付け可能です。
技術仕様
下記の仕様表は、VRV030の全バリエーションに共通する機械的特性、潤滑特性、および負荷特性を示しています。続く比率/効率/慣性表は、各バックラッシュクラスごとの比率別性能データを示しています。適合性の確認および購入仕様書の作成時には、これらの表の両方をご活用ください。
| 仕様 | 価値 |
|---|---|
| 重さ | 0.15 kg (P15フレーム) |
| 標準入力速度 [S1 T₂n] n1nom | 1,000 min⁻¹ (回転/分) |
| 最大入力速度 n1max | 3,000 min⁻¹ (回転/分) |
| 潤滑 | グリース — シェル ガダス S5 V4P 2.5 |
| 最大動作温度 | 約60℃ |
| 最大入力ラジアル荷重 Fr1 | 10 N |
| 最大出力ラジアル荷重 Fr2 | 北緯80度 |
| 最大出力軸荷重 Fa2 | 北緯30度 |
P15シリーズの比率、効率、バックラッシュ、慣性に関する表
部品番号の接尾辞: 標準 = 出力バックラッシュ≦0.50°; A = ≤0.13°(バックラッシュ低減) AR = ≤0.066°(精密バックラッシュ)。効率(ηz)は公称入力速度で測定。入力における反射慣性モーメント(kg·m²)。すべてのリード方向:右手。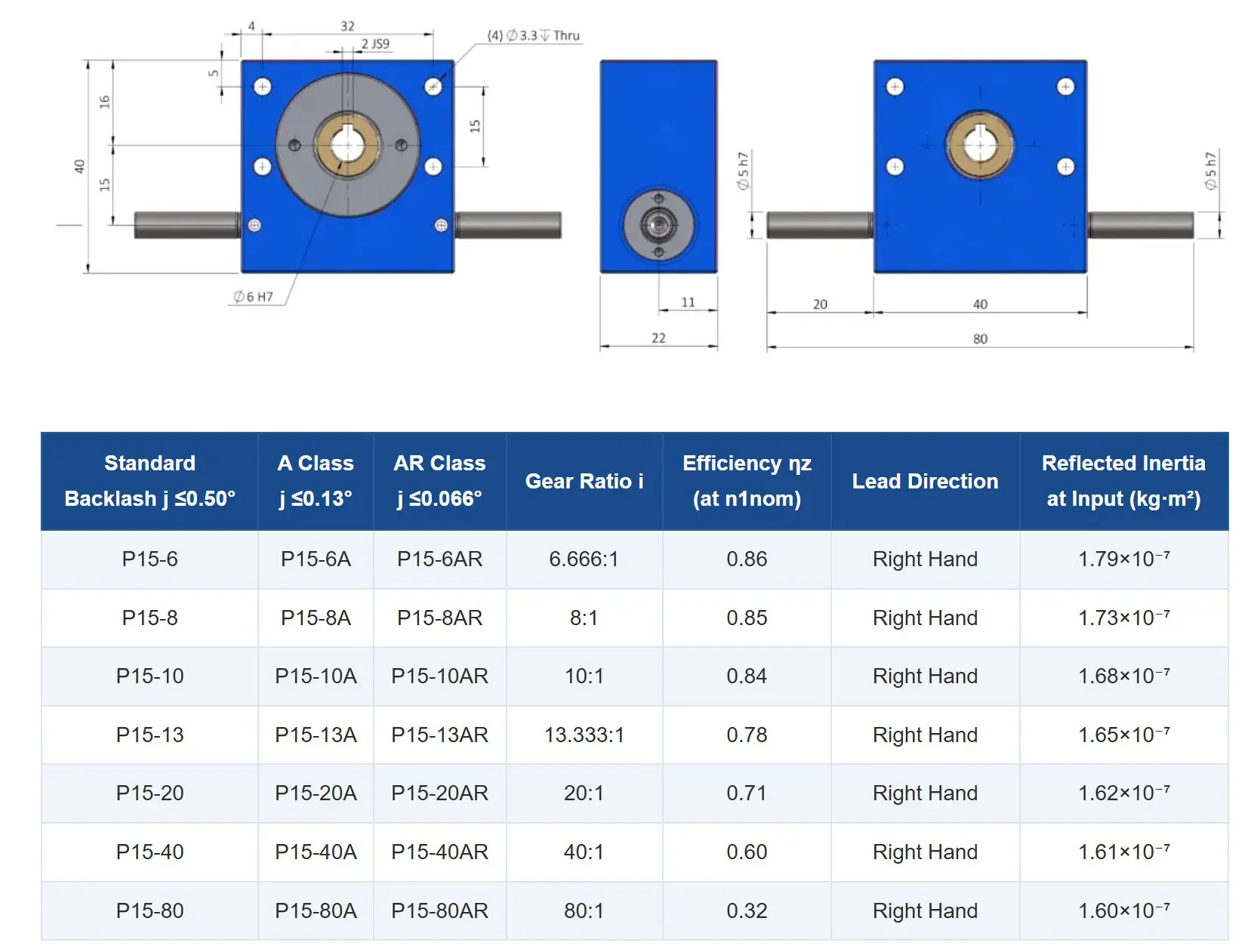
注:ご使用のアプリケーションでのテストが必要です。デューティサイクルと適合性については、ご自身の計算でご確認ください。記載されている値はあくまで目安です。アプリケーションのデューティサイクルと周囲温度によっては、冷却が必要になる場合があります。
適切なバックラッシュクラスの選択
ウォームギアのバックラッシュとは、入力軸を固定した状態で出力軸に生じる角度方向の遊びのことです。バックラッシュが小さいほど、反転時の位置再現性は向上しますが、同時に製造公差が厳しくなり、慣らし運転期間が短縮され、単価も高くなります。実際の用途で必要とされるよりも厳しいクラスを指定するのは無駄な出費であり、逆に緩すぎるクラスを指定すると、制御システムが電子的に補正しなければならない位置誤差が生じます。
| クラス | 出力でのバックラッシュ | 代表的な用途 | 相対コスト |
|---|---|---|---|
| 標準 | ≤ 0.50° | 一方向駆動装置、負荷がかかっても逆回転しないソーラートラッカー、位置フィードバック補正付きコンベアインデックス機構 | 最低 |
| A | ≤ 0.13° | 反転時に再現可能な位置決めを必要とするロボットアーム関節、アンテナ指向駆動装置、精密な工業用計量装置 | 中くらい |
| AR | ≤ 0.066° | 高精度ロボットアーム、軍用光学システム、望遠鏡方位角駆動装置、マイクロディスペンシングおよび検査装置 | 最高 |
実用的なガイドとして、サーボコントローラがバックラッシュを電子的に補正し、駆動方向が主に一方向である場合は、通常、標準クラスで十分です。方向反転時に真の機械的位置決め再現性が必要な場合(基準点に戻るロボット関節など)、角度誤差の許容範囲に応じてクラスAまたはARを指定してください。表の効率の数値は、より厳しいクラスを使用しても出力効率が大幅に低下しないことを示しています(標準の6.666:1での0.86とクラスARでの同じ値を比較してください)。同じ比率でのクラス間の効率の差は無視できる程度です。
VRV030の設計上の強み

✦ 3つのバックラッシュクラス ― 予算に合わせて精度を調整
標準、A、ARの各クラスは、一般的な位置決めから高精度ロボットまで、あらゆる精度範囲を同じ筐体でカバーします。適切なクラスを選択することで、不要な精度を過剰に指定したり、重要な精度を不足させたりすることを避けることができます。
✦グリース潤滑 - 向きに依存しない
Shell Gadus S5グリース潤滑方式を採用しているため、油面管理や油面位置の制約は一切不要です。VRV030は、水平、垂直、逆さま、傾斜など、あらゆる姿勢で設置でき、油溜まりの変位を心配する必要はありません。これは、任意の方向に回転するロボットアームの関節にとって非常に重要です。
✦ 最大入力回転数3,000rpm - 高速サーボ対応
最大入力速度3,000rpmは、一次減速段なしでサーボモータを直接接続するのに適しています。20:1のVRV030を搭載したブラシレスDCサーボを2,000rpmで動作させた場合、100rpmの出力が得られます。これは、ロボット関節駆動やソーラーパネル傾斜駆動などでよく用いられる構成です。
✦一体型鋳造ハウジング - 位置合わせ一体型
一体成型されたハウジングは、シム調整や外部アライメント治具を必要とせずに、ウォームとホイールの正確な位置合わせを維持します。これは、ハイエンドの精密ギアボックスで使用されている設計原理と同じもので、コストははるかに低く抑えられています。一体成型による穴あけ方式により、ハウジングの鋳造公差内でシャフトの平行度とベアリングシートの同心度が保証されます。
✦ 比率ごとの効率データ公開
多くの小型ギアボックスメーカーは、シリーズ全体の効率値を1つだけ公表しています。VRV030の表には、6.666:1の0.86から80:1の0.32まで、各ギア比における測定効率が記載されています。これはモーターの熱設計において重要です。80:1のサーボは、6.666:1の構成と比較して、同じ出力作業を行うために3倍の入力電力を供給する必要があります。
✦ 反射慣性データ — サーボチューニングリファレンス
入力における反射慣性モーメント(約 1.60~1.79 × 10⁻⁷ kg·m²)は、各比率ごとに公表されています。この数値はサーボモータのゲイン調整に不可欠です。制御エンジニアは、モータの軸にどれだけの負荷慣性モーメントが発生するかを知る必要があります。これは、負荷慣性モーメント÷比率²にギアボックスの反射慣性モーメントを加えた値です。高速サーボループでは、この違いが重要になります。
主な用途
▸ 産業用ロボット ― 関節およびエンドエフェクタ駆動装置

ロボットアームの手首関節、工具交換アクチュエータ、部品操作駆動装置などでは、一般的に任意の向きでコンパクトかつ高トルクのギアが必要となります。VRV030はグリース潤滑方式を採用しているため、あらゆる取り付け角度に対応できます。また、3,000rpmの入力速度と3種類のバックラッシュクラスにより、高速掃引動作(低比、標準クラス)と精密位置決め関節(高比、AまたはARクラス)の両方に対応します。20:1の比率で効率0.71の50Wサーボモーターは、約35Wの出力機械動力を供給します。これは、ハンドリングロボットのコンパクトなグリッパーや手首アクチュエータに十分な動力です。
▸ 太陽エネルギー ― パネル追尾および方位角駆動装置

単軸および二軸ソーラートラッカーでは、仰角と方位角の両方でパネルの角度を正確に調整する必要があります。駆動装置は、指令を受けていないときに風荷重がかかった状態でパネルの位置を保持する必要があります。VRV030は、20:1以上の比率で自己ロックします(20:1の効率0.71は自己ロックの閾値を超えていますが、効率0.60の40:1および効率0.32の80:1では、実用的な自己ロックが適用されます)。標準バックラッシュクラスは通常、ソーラートラッキングに十分です。ほとんどのPVシステムのパネル角度許容値は、標準バックラッシュ値0.50°よりも数倍広くなっています。
▸ 軍事、監視、精密光学機器
無人車両の操舵アクチュエータ、アンテナ指向機構、および光電センサ位置決めシステムには、小型化と高精度で再現性の高い角度位置決めの両方が求められます。VRV030 ARクラスは、10:1または13.333:1の比率で、バックラッシュは0.066°未満であり、0.15kgの筐体内にこれらの要件を満たします。公開されている反射慣性により、サーボドライブエンジニアは制御ループ設計中にシステムダイナミクスを正確にモデル化できます。これは、軍事装備品の調達で通常要求される検証文書の要件です。
Ondrives & Rino P15 交換ガイド
VRV030は、Ondrives & Rino P15ウォームギア減速機の互換アフターマーケット交換部品として製造されています。Korea Ever-PowerはOndrives & Rinoとは一切関係がなく、また同社から認可も受けていません。VRV030は、寸法および性能において互換性があり、そのまま交換可能なように設計された独立した製品です。Ondrives & Rino純正部品については、製造元にお問い合わせください。
| チェックポイント | オンドライブス&リノ P15 | VRV030 | 互換性がある? |
|---|---|---|---|
| 製品シリーズ/フレーム | P15 | VRV030 | ✓ 同じフレームクラス |
| 利用可能な比率 | 6.666, 8, 10, 13.333, 20, 40, 80 | 6.666, 8, 10, 13.333, 20, 40, 80 | ✓ フルマッチ |
| バックラッシュクラス | 標準 / A / AR | 標準 / A / AR | ✓ フルマッチ |
| 公称入力速度 | 1,000回転/分 | 1,000回転/分 | ✓ マッチ |
| 最大入力速度 | 3,000回転/分 | 3,000回転/分 | ✓ マッチ |
| 潤滑 | グリース | シェル ガダス S5 V4P 2.5 | ✓ 互換性のあるグレード |
| 最大出力ラジアル荷重 Fr2 | 北緯80度 | 北緯80度 | ✓ マッチ |
| OEM / アフターマーケット | 純正メーカー部品 | アフターマーケット交換部品 | — アプリケーションを確認してください |
VRV030を特定の用途でテストしてから、車両全体の交換を決定することをお勧めします。寸法図と詳細な仕様は、リクエストに応じて提供いたします。 韓国エバーパワー 初回注文前に適合性を確認してください。
適合したドライブコンポーネント
VRV030ギアボックスは、精密駆動アセンブリを構成する部品の一つです。ウォームホイールの摩耗特性、ウォームシャフトの精度等級、モーターカップリングの種類は、システムの長期的な位置決め精度に影響を与えます。韓国エバーパワーは、このギアボックスシリーズの全部品を供給しています。

⚙ ウォームホイール — ワームワームホイールトップ
VRV030フレーム用の精密ウォームホイールは、標準、A、ARバックラッシュクラスの中心距離と歯形に合わせて製造されています。お問い合わせの際は、ギア比とバックラッシュクラスをお知らせください。交換用ホイールがどのクラスに適合するかを決定するプロファイルと表面仕上げの仕様を確認いたします。
⚙ ワームシャフト — ウォームホイールギアトップ
AまたはARバックラッシュ仕様に必要な公差クラスに合わせてウォームシャフトを研削します。適切な精度クラスでDIN 3974に準拠した精密研削を行うことで最終的なバックラッシュ等級が決まります。ウォームシャフトのプロファイル精度を高めることは、ARクラスを達成するための2つの主要な要素(ホイールプロファイル精度と並んで)の1つです。
⚙ シャフトカップリング
VRV030を使用した高精度サーボドライブの場合、サーボモータシャフトとギアボックス入力ボア間の入力側接続には、バックラッシュゼロのビームカップリングまたはベローズカップリングが標準的に使用されます。ARクラスのアプリケーションでは、標準的なポリウレタン製スパイダーを備えたジョーカップリングは避けるべきです。スパイダーの柔軟性により角度方向の遊びが生じ、高精度ギアクラスのバックラッシュによる利点が損なわれるためです。
よくある質問
標準、A、ARのバックラッシュクラスはどのように選べば良いですか?
→ 単一の位置決め動作とその後の反転動作における、アプリケーションの角度誤差許容範囲を特定してください。システムが方向変更時に最大 0.5° のデッドゾーンを許容できる場合 (コントローラで管理)、Standard クラスで十分です。コントローラ補正なしで 0.13° 以内の機械的繰り返し精度が必要な場合は、クラス A を指定してください。AR の場合、バックラッシュが十分に小さいため、ほとんどのサーボコントローラは通常の位置ループゲイン内で方向反転を追跡できます。望遠鏡、精密光学機器、高精度ロボット関節には AR を指定してください。
VRV030は本当にセルフロック式ですか?また、どのギア比が該当しますか?
→ 40:1 (効率 0.60) および 80:1 (効率 0.32) では、VRV030 は静的条件下で効果的にセルフロックします。リード角はグリース潤滑メッシュの摩擦角よりも小さくなります。20:1 (効率 0.71) 以下では、十分な出力負荷がかかると逆駆動が発生する可能性があります。風荷重下で位置を保持する必要がある太陽光発電およびアンテナ位置決めドライブには、40:1 または 80:1 を指定してください。実際のアプリケーションでは、動作温度、潤滑状態、振動などによって摩擦角が変化する可能性があるため、必ずセルフロックを確認してください。
10:1の比率における最大出力トルクはどれくらいですか?
→ 最大出力トルクは入力時のモータ出力に依存します。VRV030 は 10:1 で効率が 0.84 なので、出力トルク = (入力電力 × 効率 × 60) ÷ (2π × 出力回転数 (rpm)) となります。10W モータで定格入力 1,000 rpm の場合、出力トルク ≈ (10W × 0.84 × 60) ÷ (2π × 100 rpm) ≈ 0.8 Nm となります。最大連続出力トルクは、ハウジングの熱制限と最大出力ラジアル荷重 Fr2 = 80 N によって制限されます。負荷の組み合わせが両方の制限を同時に超えていないことを確認してください。
VRV030は3,000rpmの入力で連続運転できますか?
→ 3,000 rpm は定格最大入力回転数であり、全負荷時の連続運転定格ではありません。3,000 rpm では、入力軸ベアリングの状態に対してグリース潤滑膜が十分であることを確認する必要があります。2,000 rpm を超える連続運転の場合は、特定の運転サイクルと負荷の組み合わせがグリース充填の熱的および潤滑的限界内であることを Korea Ever-Power に確認してください。
VRV030は別途モーターカップリングが必要ですか、それともモーターを直接取り付けることができますか?
→ VRV030は、サーボモーターまたはステッピングモーターのシャフトを入力穴に直接挿入できます。このユニットにはモーターフランジ面はありません。モーターシャフトとギアボックスの入力穴の間にはカップリングが必要です。高精度ARクラスのアプリケーションでは、ゼロバックラッシュのビームまたはベローズカップリングを使用してください。標準およびAクラスのアプリケーションでは、ソフトポリウレタン製スパイダーを備えた標準ジョーカップリングでも構いませんが、スパイダーによってわずかな角度コンプライアンスが加わり、システムの実効バックラッシュが増加することに注意してください。
標準型ユニットとAR型ユニットでは、反射慣性モーメントの値は変わりますか?
→ いいえ。反射慣性モーメントは、バックラッシュのクラス間で変化しないギア形状(歯数、中心距離、材質)の関数です。表中の 1.60~1.79 × 10⁻⁷ kg·m² の値は、同じ比率で 3 つのクラスすべてに適用されます。クラスの区別は、ギアのかみ合いの製造公差にのみ影響し、回転部品の物理的な質量分布には影響しません。
お客様の声
キム・ヒョヌロボット工学エンジニア、ソウルオートメーションシステムズ(2024年)
「ハンドリングロボットの手首関節に使用されているOndrives P15-20Aユニットを交換しました。VRV030-20Aのバックラッシュは0.11°で、Aクラスの仕様である≤0.13°の範囲内でした。交換後のサーボループの動作は元のものと全く同じでした。純正部品と比較して、ユニットコストを40%削減できました。」
パク・サンイル機械エンジニア、大田太陽光発電機器OEM(2024年第3四半期)
「当社では、単軸ソーラートラッカーの方位角駆動装置に、VRV030を40:1の標準クラスで使用しています。この比率での効率は0.60であるため、ヘリカルギアボックスに比べてモーターのサイズは若干大きくなりますが、40:1のセルフロック機能により、別途ブレーキが不要になり、電気系統が簡素化されます。18ヶ月間、180台のユニットを現場で稼働させていますが、ギアボックスの故障は一切発生していません。」
チェ・ビョンジュン制御エンジニア、釜山防衛システムインテグレーター(2025年)
「アンテナ指向アプリケーション向けに指定されたARクラス。最初のロットのバックラッシュは0.05°で、仕様の≤0.066°を上回りました。仕様書に記載された反射慣性データは、サーボの試運転ドキュメント作成に不可欠でした。製品は完全な寸法証明書付きで納品されました。」
イ・ジュンソク京畿道精密機器株式会社 調達エンジニア(2024年第4四半期)
「このサプライヤーを試してみようと思った決め手は、ギア比ごとの効率表でした。これほど詳細なギア比ごとの効率データを公開しているウォームギアボックスメーカーはほとんどありません。80:1のギア比で0.32という効率は、当社のサーボドライブシステムの熱管理にまさに必要なものでした。」
ユン・ギテオートメーションインテグレーター、仁川(2024年)
「ディスペンシングマシンの位置決め軸に、VRV030を13.333:1のAクラス潤滑比で使用しました。グリース潤滑は実用的な利点であり、異なる製品フォーマットに合わせて機械の向きを変える際に、油面レベルの心配がありません。純正品と比較した交換コストは非常に魅力的で、1製品サイクル内で認定・承認を得ることができました。」
ハン・スヨン技術購買担当者、ソウル研究機器サプライヤー(2024年後半)
「顕微鏡ステージ駆動用に8:1の標準クラスのギアを注文しました。ロボット工学や太陽光発電の用途としては一般的ではありませんが、コンパクトなサイズと滑らかな動作はまさに私たちが求めていたものでした。配送は5営業日でした。8ヶ月間ラボで使用していますが、問題は一切ありません。」
追加情報
| エディタ | Cxm |
|---|

































