VRV030 matovaihteen alennusvaihde | Ondrives Rino P15 -vaihto, IP67

VRV030-tarkkuusmatovaihteisto, paino 0,15 kg, suurin sisääntulonopeus 3 000 rpm, voideltu Shell Gadus S5 -voitelulla. Kuusi välityssuhdetta 6,666:1 - 80:1. Kolme välyksen tarkkuusluokkaa – vakio (≤0,50°), A (≤0,13°), AR (≤0,066°) – täydellä hyötysuhteella ja heijastuneen inertian tiedoilla välityssuhdetta kohden. Mittasuhteeltaan yhteensopiva korvaaja Ondrives- ja Rino P15 -sarjoille.
VRV030 Tarkkuusmatovaihteen alennusvaihde
VRV030 on pienoiskokoinen tarkkuuslaite matovaihteen alennusvaihde rakennettu teollisuusrobotiikan, aurinkoseurantajärjestelmien ja sotilasvarusteiden tarkkoihin ja tilaa säästäviin käyttöihin. Pienimmässä muodossaan 0,15 kg painava yksikkö hyväksyy jopa 3 000 rpm:n syöttönopeudet ja se on vakiona rasvavoideltu Shell Gadus S5 V4P 2.5 -öljyllä, mikä poistaa öljykylpyyksiköiden vaatiman öljytason hallinnan asennoissa, joissa verkko olisi ajoittain paljaana.
Kullekin suhteelle on saatavilla kolme välyksen tarkkuusluokkaa: vakio (lähtövälys ≤0,50°), A-luokka (≤0,13°) ja AR-luokka (≤0,066°). Tämä kolmitasoinen järjestelmä sovittaa tarkkuusvaatimuksen suoraan osan hintaan – aurinkopaneelien paikannuslaite, joka sietää 0,30° välystä, voi käyttää vakioluokkaa; toistettavaa mikropaikannusta vaativan robottikäsivarren tulisi määrittää luokka AR. Kunkin suhteen ja luokan täydelliset välyksen, hyötysuhteen ja heijastuneen inertian tiedot on esitetty alla olevassa taulukossa.
VRV030 on mittasuhteiltaan yhteensopiva korvaaja Ondrives & Rino P15 -matovaihteen alennusvaihteistosarjalle. Korea Ever-Power valmistaa VRV030:aa jälkimarkkinavaihtoehtona – ei alkuperäisenä osana. Alkuperäisten Ondrives & Rino -komponenttien osalta ota yhteyttä alkuperäiseen valmistajaan. Jos haluat kustannustehokkaan ja yhteensopivan korvaavan osan samoilla suorituskykytiedoilla, VRV030 on suoraan toimitettavissa.
Tekniset tiedot
Alla oleva taulukko kattaa mekaaniset tiedot, voitelu- ja kuormitusparametrit, jotka koskevat kaikkia VRV030-versioita. Seuraava suhde-/hyötysuhde-/inertiataulukko antaa suhdekohtaiset suorituskykytiedot kullekin välysluokalle – käytä sekä soveltuvuuden varmistamisessa että ostoerittelyn kirjoittamisessa.
| Tekniset tiedot | Arvo |
|---|---|
| Paino | 0,15 kg (P15-runko) |
| Nimellinen tulonopeus [S1 T₂n] n1nom | 1 000 min⁻¹ (r/min) |
| Suurin tulonopeus n1max | 3 000 min⁻¹ (r/min) |
| Voitelu | Rasva — Shell Gadus S5 V4P 2.5 |
| Maks. käyttölämpötila | ≈ 60 °C |
| Suurin tuloradiaalikuorma Fr1 | 10 N |
| Suurin lähtöradiaalikuorma Fr2 | 80 N |
| Suurin lähtöaksiaalikuorma Fa2 | 30 N |
P15-sarjan suhde-, hyötysuhde-, välys- ja inertiataulukko
Osanumeroiden jälkiliitteet: standardi = lähtövälys ≤0,50°; A = ≤0,13° (pienennetty välys); AR = ≤0,066° (tarkkuusvälys). Hyötysuhde (ηz) mitattuna nimellisellä syöttönopeudella. Heijastunut inertia syöttökohdassa kg·m². Kaikki syöttösuunnat: Oikeakätinen.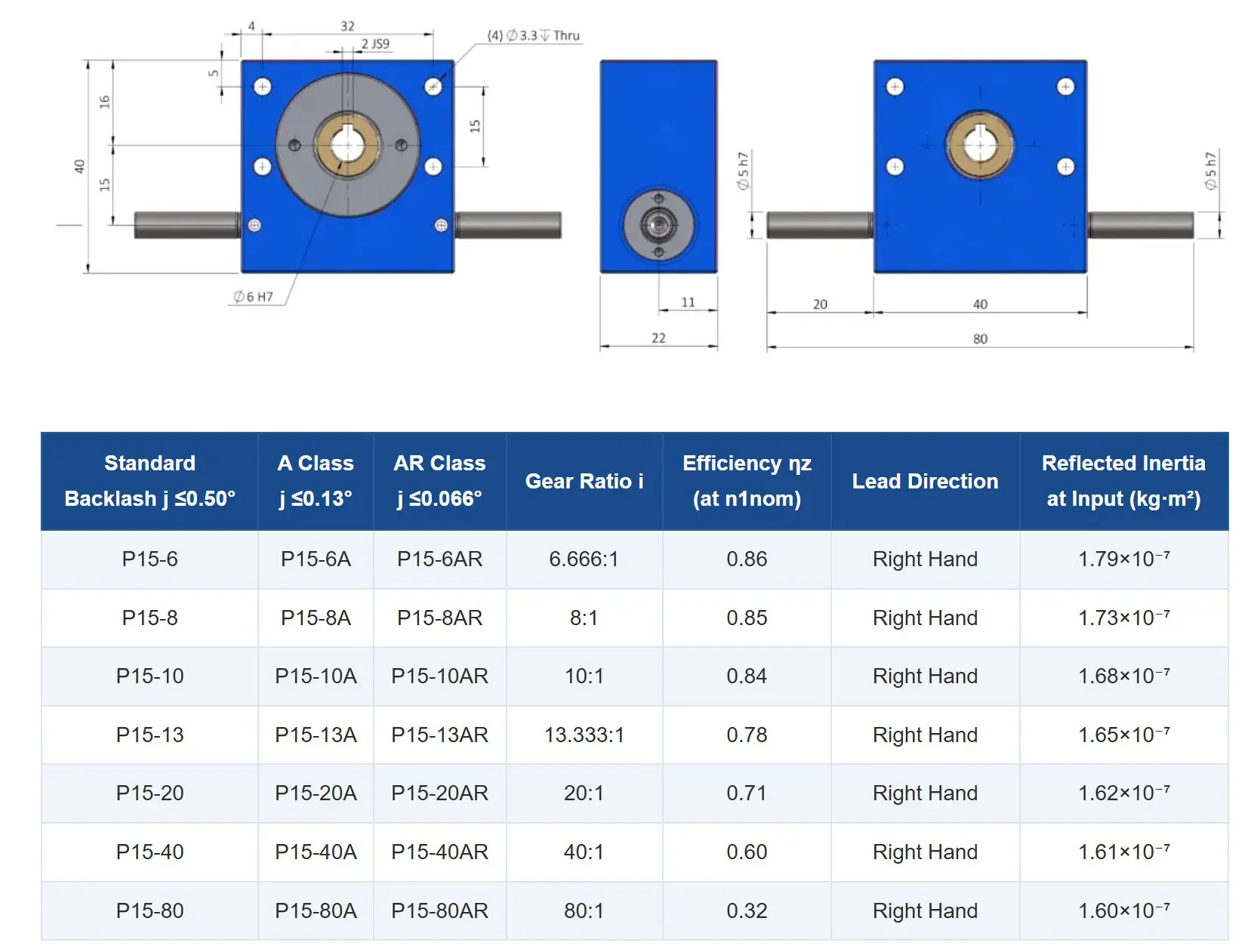
Huomautus: Testaus sovelluksessasi on välttämätöntä. Varmista käyttösuhteet ja sopivuus omilla laskelmillasi. Luetellut arvot ovat vain ohjeellisia. Jäähdytys voi olla tarpeen sovelluksen käyttösuhteesta ja ympäristön lämpötilasta riippuen.
Oikean vastaiskuluokan valitseminen
Matovaihteen välys on kulmavälys lähtöakselilla, kun tuloakseli pidetään paikallaan. Pienempi välys tarkoittaa parempaa asennon toistettavuutta peruutettaessa – mutta se tarkoittaa myös tiukempia valmistustoleransseja, lyhyempiä sisäänajoaikoja ja korkeampia yksikkökustannuksia. Tiukemman luokan määrittäminen kuin sovelluksesi todellisuudessa vaatii, on tarpeeton kustannus; liian löysän määrittämisen jälkeen syntyy asentovirheitä, jotka ohjausjärjestelmien on kompensoitava elektronisesti.
| Luokka | Välys ulostulossa | Tyypillinen sovellus | Suhteelliset kustannukset |
|---|---|---|---|
| Standardi | ≤ 0,50° | Yksisuuntaiset käyttölaitteet; aurinkoseurantalaitteet, jotka eivät peruuta kuormituksen aikana; kuljettimen indeksointi asentopalautteen korjauksella | Alin |
| A | ≤ 0,13° | Robottikäsivarsien nivelet, jotka vaativat toistettavaa asemointia peruutettaessa; antennin suuntauslaitteet; tarkka teollisuusannostelu | Keskikokoinen |
| AR | ≤ 0,066° | Tarkat robottikäsivarret; sotilaskäyttöön tarkoitetut optiset järjestelmät; teleskooppien atsimuuttimoottorit; mikroannostelu- ja tarkastuslaitteet | Korkein |
Käytännön ohjeena: jos servo-ohjaimesi kompensoi välyksen elektronisesti ja ajat yhteen vallitsevaan suuntaan, standardiluokka on yleensä riittävä. Jos tarvitset todellista mekaanista paikannuksen toistettavuutta suunnanvaihdossa – kuten robottinivelessä, joka palaa nollapisteeseen – määritä luokka A tai AR kulmavirhebudjettisi mukaan. Taulukon hyötysuhdeluvut osoittavat, että tiukemmat luokat eivät merkittävästi vähennä lähtötehokkuutta (vertaa 0,86 standardilla 6,666:1 verrattuna samaan arvoon luokassa AR) – hyötysuhdeero samalla suhteella luokkien välillä on merkityksetön.
VRV030:n suunnittelun vahvuudet

✦ Kolme vastareaktioluokkaa – sovita tarkkuus budjettiin
Standard-, A- ja AR-luokat kattavat koko tarkkuusalueen yleisestä paikannuksesta aina erittäin tarkkaan robotiikkaan samassa kotelossa. Oikean luokan valinta estää tarkkuuden ylimäärittelyn siellä, missä sitä ei tarvita, ja alimäärittelyn siellä, missä sillä on merkitystä.
✦ Rasvavoitelu — Suunnasta riippumaton
Shell Gadus S5 -rasvavoitelu tarkoittaa, että öljytasoa ei tarvitse hallita eikä öljyn sijainnin suunnalle ole rajoituksia. VRV030 voidaan asentaa mihin tahansa asentoon – vaakasuoraan, pystysuoraan, ylösalaisin tai kulmaan – ilman öljyaltaan siirtymisongelmia. Tämä on kriittistä robottikäsivarsien nivelille, jotka pyörivät mielivaltaisissa asennoissa.
✦ Suurin tulonopeus 3 000 rpm — Yhteensopiva suurnopeusservojen kanssa
Suurin 3 000 rpm:n syöttönopeus on yhteensopiva suoran servomoottorikytkennän kanssa ilman ensisijaista alennusastetta. Harjaton tasavirtaservo, joka käy nopeudella 2 000 rpm ja jossa on 20:1 VRV030, tuottaa 100 rpm:n ulostulonopeuden – yleinen kokoonpano robottinivelissä ja aurinkopaneelien kallistuskäytöissä.
✦ Yhdestä kappaleesta valettu kotelo — Integroitu kohdistus
Yhdestä kappaleesta valmistettu valettu kotelo säilyttää mato-pyöräsuuntauksen ilman säätölevyjä tai ulkoisia kohdistuslaitteita. Tämä on sama suunnitteluperiaate, jota käytetään huippuluokan tarkkuusvaihteistoissa murto-osalla kustannuksista – poraus yhdessä -asetusmenetelmä takaa akselin yhdensuuntaisuuden ja laakeripesän samankeskisyyden kotelon valutoleranssien rajoissa.
✦ Julkaistut hyötysuhdetiedot suhdelukua kohden
Monet miniatyyrivaihteistojen toimittajat julkaisevat yhden hyötysuhdeluvun koko välityssuhteelle. VRV030-taulukossa luetellaan mitattu hyötysuhde jokaiselle välityssuhteelle – 0,86:sta suhteella 6,666:1 aina 0,32:een suhteella 80:1. Tällä on merkitystä moottorin lämpömitoituksen kannalta: 80:1-suhteisen servon on syötettävä kolminkertainen syöttöteho samaan lähtötyöhön verrattuna 6,666:1-kokoonpanoon.
✦ Heijastettu inertiatieto — Servo-virityksen viite
Heijastunut inertia tulossa (noin 1,60–1,79 × 10⁻⁷ kg·m²) julkaistaan kullekin suhteelle. Tämä luku on olennainen servomoottorin vahvistuksen säätöä varten – ohjausinsinöörin on tiedettävä, kuinka paljon kuormahitautta moottori näkee akselillaan, eli kuormahitaus ÷ suhde² plus vaihteiston heijastunut inertia. Suurnopeuksisissa servoviiveissä tällä erolla on merkitystä.
Ensisijaiset sovellukset
▸ Teollisuusrobotiikka — Nivel- ja efektorikäyttölaitteet

Robottikäsivarsien rannenivelet, työkalunvaihtotoimilaitteet ja osien käsittelykäytöt vaativat yleensä kompakteja, suuren vääntömomentin hammaspyöriä mielivaltaisissa asennoissa. VRV030:n rasvavoitelu käsittelee kaikki asennuskulmat; sen 3 000 rpm:n syöttönopeus ja kolme välysluokkaa kattavat sekä nopeat pyyhkäisyliikkeet (alempi välityssuhde, vakioluokka) että tarkkuusasennuksen nivelet (korkeampi välityssuhde, A- tai AR-luokka). Suhteella 20:1 ja hyötysuhteella 0,71 50 W:n servomoottori tuottaa noin 35 W mekaanista lähtötehoa – riittävästi kompaktille tarttujalle tai rannetoimilaitteelle käsittelyrobotissa.
▸ Aurinkoenergia — Paneelien seuranta ja atsimuuttimoottorit

Yksi- ja kaksiakseliset aurinkoseurantalaitteet vaativat tarkan paneelin kulman säädön sekä korkeus- että atsimuuttisuunnassa. Käyttölaitteen on pidettävä paneelin asento tuulikuormituksen alaisena, kun sitä ei ohjata – suhteilla 20:1 ja suuremmilla VRV030 on itselukittuva (20:1-hyötysuhde 0,71 on itselukittuvan kynnyksen yläpuolella, mutta suhteilla 40:1 ja hyötysuhteella 0,60 sekä suhteilla 80:1 ja hyötysuhteella 0,32 pätee käytännön itselukittuvuus). Vakiovälysluokka on tyypillisesti riittävä aurinkoseurantaan – useimpien aurinkosähköjärjestelmien paneelin kulman toleranssi on useita kertoja suurempi kuin 0,50°:n vakiovälys.
▸ Sotilas-, valvonta- ja tarkkuusoptiset laitteet
Miehittämättömien ajoneuvojen ohjaustoimilaitteet, antennin suuntausmekanismit ja sähköoptiset anturien paikannusjärjestelmät vaativat sekä kompaktia kokoa että tarkkaa ja toistettavaa kulma-asennusta. VRV030 AR -luokka 10:1 tai 13,333:1 – välyksellä alle 0,066° – tarjoaa tämän 0,15 kg:n kotelossa. Julkaistu heijastunut inertia mahdollistaa servokäyttöinsinöörien mallintaa järjestelmän dynamiikan tarkasti säätösilmukan suunnittelun aikana, mikä on vaatimus sotilaslaitteiden hankinnoissa tyypillisesti vaadittavalle todentamisdokumentaatiolle.
Ondrives & Rino P15 Replacement Guide
VRV030 on yhteensopiva jälkimarkkinoilla saatavilla oleva korvaaja Ondrives & Rino P15 -matovaihteelle. Korea Ever-Power ei ole sidoksissa Ondrives & Rinoon eikä ole sen valtuuttama – VRV030 on itsenäinen tuote, joka on suunniteltu mitoiltaan ja suorituskyvyltään yhteensopivaksi ja sitä voidaan käyttää suoraan korvaajana. Alkuperäisten Ondrives & Rino -komponenttien osalta ota yhteyttä valmistajaan.
| Tarkistuspiste | Ondrives & Rino P15 | VRV030 | Yhteensopiva? |
|---|---|---|---|
| Tuotesarja / runko | P15 | VRV030 | ✓ Sama kehysluokka |
| Käytettävissä olevat suhteet | 6.666, 8, 10, 13.333, 20, 40, 80 | 6.666, 8, 10, 13.333, 20, 40, 80 | ✓ Täysi ottelu |
| Vastareaktiokurssit | Vakio / A / AR | Vakio / A / AR | ✓ Täysi ottelu |
| Nimellinen syöttönopeus | 1 000 rpm | 1 000 rpm | ✓ Ottelu |
| Suurin syöttönopeus | 3 000 rpm | 3 000 rpm | ✓ Ottelu |
| Voitelu | Rasva | Shell Gadus S5 V4P 2.5 | ✓ Yhteensopiva laatu |
| Suurin lähtösäteittäiskuorma Fr2 | 80 N | 80 N | ✓ Ottelu |
| OEM / jälkimarkkinat | Alkuperäinen valmistajan osa | Jälkimarkkinoiden vaihto | — Vahvista sovelluksellesi |
Suosittelemme VRV030:n testaamista omassa sovelluksessasi ennen laitekannan vaihtoon sitoutumista. Mittapiirustukset ja täydelliset tekniset tiedot ovat saatavilla pyynnöstä osoitteesta Korea Ever-Power varmistaaksesi sopivuuden ennen ensimmäistä tilaustasi.
Yhteensopivat käyttökomponentit
VRV030-vaihteisto on yksi komponentti tarkkuuskäyttökokoonpanossa. Matopyörän kulumisominaisuudet, matoakselin tarkkuusluokka ja moottorin kytkentätyyppi vaikuttavat kaikki järjestelmän pitkän aikavälin paikannustarkkuuteen. Korea Ever-Power toimittaa täydellisen komponenttisarjan tälle vaihteistoperheelle.

⚙ Madonpyörä — matomatopyörä.top
Tarkkuusmadonpyörät VRV030-runkoon, valmistettu vastaamaan keskiöväliä ja hammasprofiilia vakio-, A- ja AR-välysluokkien mukaisesti. Ilmoita suhde ja välysluokka tiedustelun yhteydessä — vahvistamme profiilin ja pinnan viimeistelyn, joka määrittää, mihin luokkaan vaihtopyörä kuuluu.
⚙ Madon akseli — matopyörävaihteisto.yläosa
Madonakselien hiominen A- tai AR-välysspesifikaation edellyttämään toleranssiluokkaan. Tarkkuushionta standardin DIN 3974 mukaisesti vastaavassa tarkkuusluokassa määrittää lopullisen välysasteen – matoakselin tarkempi profiilitarkkuus on toinen kahdesta ensisijaisesta vivusta (pyörän profiilitarkkuuden ohella) AR-luokan saavuttamiseksi.
⚙ Akselikytkimet
Tarkkuusservokäytöissä VRV030:n kautta välyksetön palkki- tai paljekytkin on vakiona servomoottorin akselin ja vaihteiston tuloreiän välinen tulopuolen liitäntä. AR-luokan sovelluksissa tulisi välttää leukakytkimiä, joissa on standardinmukaiset polyuretaanista valmistetut joustoristimet – joustoristimen joustavuus lisää kulmavälystä, joka heikentää tarkkuusvaihteiden välysetua.
Usein kysytyt kysymykset
Miten valitsen välysluokkien Standard, A ja AR välillä?
→ Määritä sovelluksesi kulmavirhebudjetti yhdelle paikannusliikkeelle, jota seuraa suunnanvaihto. Jos järjestelmäsi sietää jopa 0,5°:n kuollutta aluetta suunnanmuutoksessa (ohjaimen hallitsemana), vakioluokka on riittävä. Mekaaniselle toistettavuudelle 0,13°:n sisällä ilman ohjaimen kompensointia, määritä luokka A. AR-luokassa välys on riittävän pieni, että useimmat servosäätimet pystyvät seuraamaan suunnanvaihtoa normaalin asentosilmukan vahvistuksensa rajoissa – määritä AR teleskooppi-, tarkkuusoptiikka- ja erittäin tarkkojen robottinivelten osalta.
Onko VRV030 todella itselukittuva ja mitkä välityssuhteet täyttävät vaatimukset?
→ Suhteilla 40:1 (hyötysuhde 0,60) ja 80:1 (hyötysuhde 0,32) VRV030 on käytännössä itselukittuva staattisissa olosuhteissa – nousukulma on rasvavoidellun verkon kitkakulman alapuolella. Suhteella 20:1 (hyötysuhde 0,71) ja sen alapuolella takaisinveto on mahdollista riittävän lähtökuorman vallitessa. Aurinko- ja antennipaikannuslaitteille, joiden on pysyttävä asennossa tuulikuorman alaisena, määritä 40:1 tai 80:1. Tarkista aina itselukittuvuus omassa sovelluksessasi – käyttölämpötila, voiteluolosuhteet ja tärinä voivat kaikki vaikuttaa kitkakulmaan käytännössä.
Mikä on suurin lähtömomentti välityssuhteella 10:1?
→ Suurin lähtömomentti riippuu moottorin tehosta tulopuolella. VRV030:n hyötysuhde on 10:1-suhteella 0,84, joten lähtömomentti = (tuloteho × hyötysuhde × 60) ÷ (2π × lähtönopeus rpm). Nimellistulonopeudella 1 000 rpm ja 10 W:n moottorilla: lähtömomentti ≈ (10 W × 0,84 × 60) ÷ (2π × 100 rpm) ≈ 0,8 Nm. Suurinta jatkuvaa lähtömomenttia rajoittavat kotelon lämpötilaraja ja suurin lähtösäteittäiskuorma Fr2 = 80 N – varmista, että kuormitusyhdistelmäsi ei ylitä molempia rajoja samanaikaisesti.
Voiko VRV030 toimia jatkuvasti 3 000 rpm:n syöttönopeudella?
→ 3 000 rpm on nimellinen suurin tulonopeus, ei jatkuva käyttönopeus täydellä kuormalla. Nopeudella 3 000 rpm rasvavoitelukalvon on oltava riittävä tuloakselin laakeriolosuhteisiin nähden. Yli 2 000 rpm:n jatkuvassa käytössä varmista Korea Ever-Powerilta, että käyttämäsi käyttöjakso ja kuormitusyhdistelmä ovat rasvatäytteen lämpö- ja voitelurajojen sisällä.
Tarvitseeko VRV030 erillisen moottorikytkimen vai voinko asentaa moottorin suoraan?
→ VRV030:n tuloreikään voidaan liittää servo- tai askelmoottorin akseli – tässä yksikössä ei ole moottorin laippapintaa. Moottorin akselin ja vaihteiston tuloreiän välillä vaaditaan kytkentä. Tarkkuuskäyttöön tarkoitetuissa AR-luokan sovelluksissa käytetään välyksetöntä palkki- tai paljekytkintä. Vakio- ja A-luokan sovelluksissa pehmeällä polyuretaanista valmistetulla ristikkoliittimellä varustettu vakioleukakytkin on hyväksyttävä, mutta on huomattava, että ristikko lisää hieman kulmajännitystä, mikä vaikuttaa järjestelmän tehokkaaseen välykseen.
Muuttuuko heijastuneen inertian luku standardi- ja AR-luokan yksiköiden välillä?
→ Ei. Heijastunut inertia on hammaspyörän geometrian (hampaiden lukumäärä, keskiöväli, materiaali) funktio, joka ei muutu välysluokkien välillä. Taulukossa olevat 1,60–1,79 × 10⁻⁷ kg·m² -arvot koskevat kaikkia kolmea luokkaa samalla suhteella. Luokkaero vaikuttaa vain hammaspyöräkytkennän valmistustoleranssiin, ei pyörivien osien fyysiseen massajakaumaan.
Mitä asiakkaat sanovat
Kim Hyun-woo, Robotiikkainsinööri, Soulin automaatiojärjestelmät (2024)
"Vaihdoin Ondrives P15-20A -yksiköt käsittelyrobotin ranneniveleen. VRV030-20A:n välys testattuna oli 0,11° – ≤0,13° A-luokan spesifikaation sisällä. Servosilmukan käyttäytyminen vaihdon jälkeen oli identtinen alkuperäisen kanssa. Säästöä yksikkökustannuksissa 40% alkuperäiseen osaan verrattuna."
Park Sang-il, koneinsinööri, Daejeonin aurinkolaitteiden OEM (Q3 2024)
"Käytämme VRV030-moottoria 40:1-vakioluokassa yksiakselisissa aurinkoseuranta-atsimuuttikäytöissämme. Tämän suhteen hyötysuhde 0,60 tarkoittaa, että moottorin koko on hieman suurempi kuin kierukkavaihteiston, mutta itselukittuva toiminta suhteessa 40:1 poistaa erillisen jarrun tarpeen ja yksinkertaistaa sähköjärjestelmää. Olemme käyttäneet 180 yksikköä kentällä ilman vaihteiston vikoja 18 kuukaudessa."
Choi Byung-jun, Ohjausinsinööri, Busanin puolustusjärjestelmien integraattori (2025)
"Määritetty AR-luokka antennin suuntaussovellukselle. Ensimmäisen erän mitattu välys oli 0,05° – parempi kuin ≤0,066°:n spesifikaatio. Spesifikaatiossa mainittu heijastuneen inertian data oli ratkaisevan tärkeää servomoottorin käyttöönottodokumentaatiolle. Tuote toimitettiin täydellä mittasertifikaatilla."
Lee Jun-seok, hankintainsinööri, Gyeonggi-do Precision Equipment Co. (neljäs neljännes 2024)
"Hyötysuhdetaulukko välityssuhteen mukaan sai meidät kokeilemaan tätä toimittajaa. Hyvin harvat matovaihteiden toimittajat julkaisevat välityssuhteen mukaisia hyötysuhdetietoja tässä mittakaavassa. 0,32:n hyötysuhde välityssuhteella 80:1 on juuri se, mitä tarvitsimme servokäyttöjärjestelmämme lämpöbudjetointiin."
Yoon Gi-tae, Automaatiointegraattori, Incheon (2024)
"Käytin VRV030-öljypumppua 13,333:1 A-luokan akselilla annostelukoneen asemointiakseliin. Rasvavoitelu on käytännöllinen etu – öljytasoa ei tarvitse huoltaa, kun konetta suunnataan uudelleen eri tuoteformaatteja varten. Vaihtokustannukset alkuperäiseen laitevalmistajiin verrattuna olivat riittävän houkuttelevat hyväksynnän saamiseksi yhden tuotesyklin aikana."
Han Soo-yeon, tekninen ostaja, Soulin tutkimuslaitteiden toimittaja (loppuvuosi 2024)
"Tilasin mikroskoopin pöytäohjaimen standardiluokassa 8:1 – ei tyypillinen robotiikka- tai aurinkoenergiasovellus, mutta kompakti koko ja tasainen liike olivat juuri sitä, mitä tarvitsimme. Toimitus oli 5 arkipäivää. Ei ongelmia 8 kuukauden laboratoriokäytön jälkeen."
Lisätiedot
| Toimittaja | Cxm |
|---|
Tutustu myös
-

EP-NRV-akselin sisääntulon matovaihteen alennusvaihteisto | Tappiakselin sisääntulo
-

WPWKT matovaihteen alennusvaihde vääntömomenttivivulla | Akseliin kiinnitetty käyttö
-

WPWKO pystysuoran akselin matovaihteen alennusvaihteisto | Akseli alaspäin suuntautuva lähtö
-

EP-NMRV-VS kaksoistuloinen matovaihteen alennusvaihteisto | Synkronointikäyttö ja enkooderin jatke
-

VRV030 matovaihteen alennusvaihteisto | Ondrives Rino P70 -vaihto
-

VRV030 matovaihteen alennusvaihteisto | Ondrives Rino P45 -vaihto
-

WPWO matovaihteen alennusvaihteisto | 19–2745 Nm, 0,12–33,2 kW Yleiskäyttöinen
-

RV-sarjan matovaihteen alennusvaihteisto / synkroninen matovaihteinen moottori ruuvitunkille

























