Redutor de engrenagem helicoidal VRV030 | Substituição do Ondrives Rino P15, IP67

Redutor de rosca sem-fim de precisão VRV030, peso 0,15 kg, velocidade máxima de entrada 3.000 rpm, lubrificado com graxa Shell Gadus S5. Seis relações de transmissão de 6,666:1 a 80:1. Três classes de precisão de folga — padrão (≤0,50°), A (≤0,13°), AR (≤0,066°) — com dados completos de eficiência e inércia refletida por relação. Substituto dimensionalmente compatível para as séries Ondrives e Rino P15.
Redutor de engrenagem helicoidal de precisão VRV030
O VRV030 é um dispositivo de precisão em miniatura. redutor de engrenagem helicoidal Projetado para acionamentos de alta precisão e com restrições de espaço em robótica industrial, sistemas de rastreamento solar e equipamentos militares. Pesando apenas 0,15 kg em sua versão mais compacta, a unidade aceita velocidades de entrada de até 3.000 rpm e é lubrificada com graxa Shell Gadus S5 V4P 2.5 como padrão — eliminando a necessidade de controle do nível de óleo, comum em unidades com banho de óleo, em situações onde a malha ficaria exposta intermitentemente.
Três classes de precisão de folga estão disponíveis para cada relação: padrão (folga de saída ≤0,50°), classe A (≤0,13°) e classe AR (≤0,066°). Este sistema de três níveis relaciona diretamente o requisito de precisão ao custo da peça — um acionador de posicionamento de painel solar que tolera 0,30° de folga pode usar a classe padrão; um braço robótico que requer microposicionamento repetível deve especificar a classe AR. Os dados completos de folga, eficiência e inércia refletida para cada relação e classe estão tabelados abaixo.
O VRV030 é um substituto dimensionalmente compatível para a série de redutores de engrenagem helicoidal P15 da Ondrives e Rino. A Korea Ever-Power produz o VRV030 como uma alternativa para o mercado de reposição — não como peça original (OEM). Para componentes originais da Ondrives e Rino, entre em contato com o fabricante original. Para uma substituição compatível com custo competitivo e os mesmos dados de desempenho, o VRV030 é uma opção direta.
Especificações técnicas
A tabela de especificações abaixo abrange os parâmetros mecânicos, de lubrificação e de carga que se aplicam a todas as variantes do VRV030. A tabela de relação/eficiência/inércia a seguir fornece dados de desempenho por relação para cada classe de folga — use ambas ao verificar a adequação e ao elaborar sua especificação de compra.
| Especificação | Valor |
|---|---|
| Peso | 0,15 kg (quadro P15) |
| Velocidade nominal de entrada [S1 T₂n] n1nom | 1.000 min⁻¹ (r/min) |
| Velocidade máxima de entrada n1max | 3.000 min⁻¹ (r/min) |
| Lubrificação | Graxa - Shell Gadus S5 V4P 2.5 |
| Temperatura máxima de operação | ≈ 60°C |
| Carga radial máxima de entrada Fr1 | 10 N |
| Carga radial máxima de saída Fr2 | 80 N |
| Carga axial máxima de saída Fa2 | 30 N |
Tabela de relação, eficiência, folga e inércia da série P15
Sufixos de número de peça: padrão = folga de saída ≤0,50°; UM = ≤0,13° (folga reduzida); AR = ≤0,066° (folga de precisão). Eficiência (ηz) medida na velocidade de entrada nominal. Inércia refletida na entrada em kg·m². Todas as direções de avanço: Sentido direito.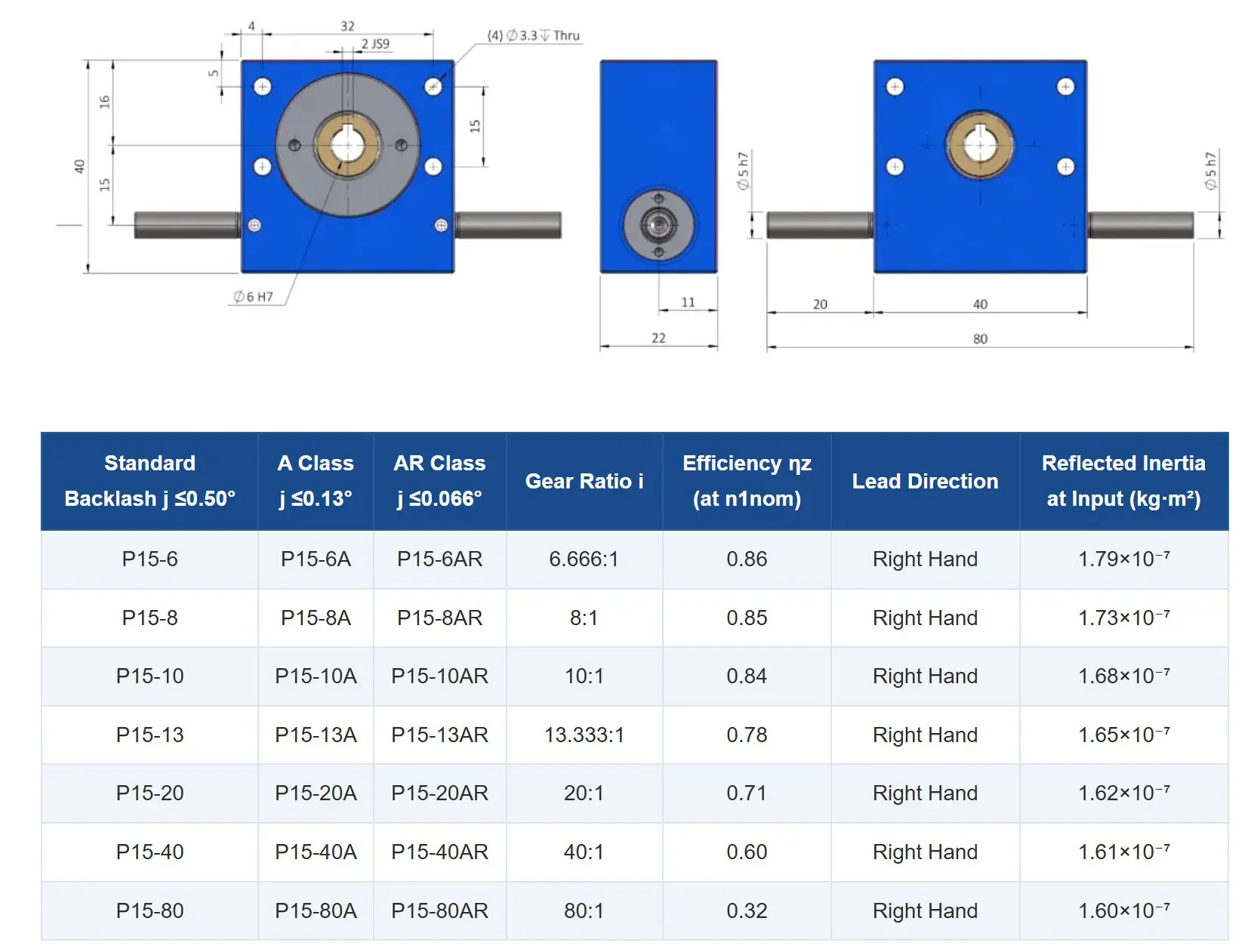
Nota: É necessário realizar testes na sua aplicação. Confirme os ciclos de trabalho e a adequação com seus próprios cálculos. Os valores listados são apenas para orientação. O resfriamento pode ser necessário dependendo do ciclo de trabalho da aplicação e da temperatura ambiente.
Selecionando a aula de Backlash adequada
A folga em uma engrenagem sem-fim é a folga angular no eixo de saída quando o eixo de entrada está parado. Uma folga menor significa maior repetibilidade posicional na reversão — mas também significa tolerâncias de fabricação mais rigorosas, períodos de amaciamento mais curtos e um custo unitário mais alto. Especificar uma classe de folga mais restrita do que a sua aplicação realmente exige é um custo desnecessário; especificar uma folga muito grande cria erros de posição que os sistemas de controle precisam compensar eletronicamente.
| Aula | Reação negativa à produção | Aplicação típica | Custo Relativo |
|---|---|---|---|
| Padrão | ≤ 0,50° | Acionamentos unidirecionais; rastreadores solares que não invertem o sentido de rotação sob carga; indexação de esteiras transportadoras com correção de feedback de posição. | Mais baixo |
| UM | ≤ 0,13° | Juntas de braço robótico que exigem posicionamento repetível na reversão; acionamentos de apontamento de antena; dosagem industrial de precisão. | Médio |
| AR | ≤ 0,066° | Braços robóticos de alta precisão; sistemas ópticos militares; mecanismos de azimute para telescópios; equipamentos de microdispensação e inspeção. | Mais alto |
Como guia prático: se o seu controlador de servo compensa a folga eletronicamente e você está operando em uma direção predominante, a classe Standard geralmente é suficiente. Se você precisa de repetibilidade de posicionamento mecânico real na inversão de direção — como em uma junta robótica que retorna a um ponto de referência — especifique a classe A ou AR, dependendo da sua tolerância ao erro angular. Os valores de eficiência na tabela mostram que classes mais restritas não reduzem significativamente a eficiência de saída (compare 0,86 na classe Standard 6,666:1 com o mesmo valor na classe AR) — a diferença de eficiência na mesma proporção entre as classes é insignificante.
Pontos fortes do design do VRV030

✦ Três aulas de Backlash — Precisão ideal para o seu orçamento
As classes Standard, A e AR abrangem toda a gama de precisão, desde posicionamento geral até robótica de alta precisão, tudo em um mesmo invólucro. Selecionar a classe correta evita especificar precisão em excesso onde não é necessário e em falta onde é importante.
✦ Lubrificação com graxa — Independente da orientação
A lubrificação com graxa Shell Gadus S5 elimina a necessidade de controle do nível de óleo e não há restrições quanto à orientação do óleo. O VRV030 pode ser montado em qualquer posição — horizontal, vertical, invertida ou angulada — sem preocupações com o deslocamento do óleo. Isso é crucial para juntas de braços robóticos que giram em orientações arbitrárias.
✦ Entrada máxima de 3.000 rpm — Compatível com servo de alta velocidade
A velocidade máxima de entrada de 3.000 rpm é compatível com o acoplamento direto de servomotores sem um estágio de redução primário. Um servomotor CC sem escovas operando a 2.000 rpm com um VRV030 de 20:1 fornece uma saída de 100 rpm — uma configuração comum em acionamentos de juntas robóticas e de inclinação de painéis solares.
✦ Carcaça fundida em peça única — Alinhamento integral
A carcaça moldada em peça única mantém o alinhamento entre o parafuso sem-fim e a engrenagem sem a necessidade de calços ou dispositivos de alinhamento externos. Este é o mesmo princípio de projeto usado em caixas de engrenagens de alta precisão, a um custo muito menor — o método de furação em uma única etapa garante o paralelismo do eixo e a concentricidade do assento do rolamento dentro das tolerâncias de fundição da carcaça.
✦ Dados de eficiência publicados por índice
Muitos fornecedores de caixas de engrenagens em miniatura publicam um único valor de eficiência para a gama. A tabela VRV030 lista a eficiência medida para cada relação — de 0,86 em 6,666:1 até 0,32 em 80:1. Isso é importante para o dimensionamento térmico do motor: um servo com relação de 80:1 deve fornecer 3 vezes mais potência de entrada para o mesmo trabalho de saída em comparação com a configuração de 6,666:1.
✦ Dados de Inércia Refletida — Referência para Ajuste de Servo
A inércia refletida na entrada (aproximadamente 1,60–1,79 × 10⁻⁷ kg·m²) é publicada para cada relação de transmissão. Esse valor é essencial para o ajuste do ganho do servomotor — o engenheiro de controle precisa saber quanta inércia de carga o motor percebe em seu eixo, que é a inércia de carga ÷ relação² mais a inércia refletida da caixa de engrenagens. Para servocontroladores de alta velocidade, essa distinção é importante.
Aplicações principais
▸ Robótica Industrial — Acionamentos de Juntas e Efetores Finais

As juntas do pulso do braço robótico, os atuadores de troca de ferramentas e os mecanismos de manipulação de peças geralmente exigem engrenagens compactas e de alto torque em orientações arbitrárias. A lubrificação a graxa do VRV030 permite qualquer ângulo de montagem; sua velocidade de entrada de 3.000 rpm e três classes de folga abrangem tanto movimentos de varredura de alta velocidade (relação mais baixa, classe Standard) quanto juntas de posicionamento de precisão (relação mais alta, classe A ou AR). Com uma relação de 20:1 e eficiência de 0,71, um servomotor de 50 W fornece aproximadamente 35 W de potência mecânica de saída — suficiente para uma garra compacta ou um atuador de pulso em um robô de manipulação.
▸ Energia Solar — Rastreamento de Painéis e Acionamentos Azimutais

Os rastreadores solares de eixo único e duplo exigem um ajuste preciso do ângulo do painel, tanto em elevação quanto em azimute. O inversor deve manter a posição do painel sob ação do vento quando não estiver sendo acionado — em relações de 20:1 e superiores, o VRV030 trava automaticamente (a eficiência de 0,71 em 20:1 está acima do limite de travamento automático, mas em 40:1 com eficiência de 0,60 e 80:1 com eficiência de 0,32, o travamento automático se aplica na prática). A folga padrão geralmente é suficiente para o rastreamento solar — a tolerância do ângulo do painel na maioria dos sistemas fotovoltaicos é várias vezes maior que o valor padrão de folga de 0,50°.
▸ Equipamentos Ópticos Militares, de Vigilância e de Precisão
Os atuadores de direção de veículos não tripulados, mecanismos de apontamento de antenas e sistemas de posicionamento de sensores eletro-ópticos exigem compacidade e posicionamento angular preciso e repetível. O servoacionador VRV030, com relação de inércia refletida de 10:1 ou 13,333:1 — e folga inferior a 0,066° — oferece essas características em uma carcaça de apenas 0,15 kg. A inércia refletida divulgada permite que os engenheiros de servoacionamentos modelem a dinâmica do sistema com precisão durante o projeto do circuito de controle, um requisito para a documentação de verificação normalmente exigida em aquisições de equipamentos militares.
Guia de substituição de Ondrives e Rino P15
O VRV030 é produzido como um substituto compatível para o redutor de engrenagem helicoidal Ondrives & Rino P15. A Korea Ever-Power não possui qualquer vínculo ou autorização da Ondrives & Rino — o VRV030 é um produto independente, projetado para ser dimensionalmente e funcionalmente compatível como um substituto direto. Para componentes originais da Ondrives & Rino, entre em contato com o fabricante.
| Ponto de verificação | Ondrives e Rino P15 | VRV030 | Compatível? |
|---|---|---|---|
| Série de produtos / estrutura | P15 | VRV030 | ✓ Mesma classe de quadro |
| Proporções disponíveis | 6.666, 8, 10, 13.333, 20, 40, 80 | 6.666, 8, 10, 13.333, 20, 40, 80 | ✓ Partida completa |
| Aulas de reação | Padrão / A / AR | Padrão / A / AR | ✓ Partida completa |
| Velocidade nominal de entrada | 1.000 rpm | 1.000 rpm | ✓ Combinar |
| Velocidade máxima de entrada | 3.000 rpm | 3.000 rpm | ✓ Combinar |
| Lubrificação | Graxa | Shell Gadus S5 V4P 2.5 | ✓ Grau compatível |
| Carga radial máxima de saída Fr2 | 80 N | 80 N | ✓ Combinar |
| OEM / mercado de reposição | Peça original do fabricante | Substituição de peças de reposição | — Verifique sua inscrição |
Recomendamos testar o VRV030 em sua aplicação específica antes de se comprometer com a substituição de toda a frota. Desenhos dimensionais e especificações completas estão disponíveis mediante solicitação. Coreia Ever-Power Para confirmar a compatibilidade antes de fazer seu primeiro pedido.
Componentes de acionamento compatíveis
A caixa de engrenagens VRV030 é um componente de um conjunto de acionamento de precisão. As características de desgaste da engrenagem sem-fim, o grau de precisão do eixo sem-fim e o tipo de acoplamento do motor afetam a precisão de posicionamento do sistema a longo prazo. A Korea Ever-Power fornece o conjunto completo de componentes para esta família de caixas de engrenagens.

⚙ Roda sem-fim — roda de minhoca.topo
Engrenagens helicoidais de precisão para a estrutura VRV030, fabricadas para corresponder à distância entre centros e ao perfil dos dentes das classes de folga padrão, A e AR. Informe a relação de transmissão e a classe de folga ao consultar o orçamento — confirmaremos a especificação do perfil e do acabamento superficial que determina a classe à qual a engrenagem de substituição se enquadra.
⚙ Eixo sem-fim — engrenagem sem-fim.topo
Os eixos sem-fim são retificados de acordo com a classe de tolerância exigida para a especificação de folga A ou AR. A retificação de precisão segundo a norma DIN 3974, na classe de precisão apropriada, determina o grau final de folga — uma maior precisão do perfil do eixo sem-fim é uma das duas principais alavancas (juntamente com a precisão do perfil da roda) para atingir a classe AR.
⚙ Acoplamentos de Eixo
Para servoacionamentos de precisão via VRV030, acoplamentos de feixe ou fole sem folga são a conexão padrão no lado de entrada entre o eixo do servomotor e o furo de entrada da caixa de engrenagens. Acoplamentos de garras com aranhas de poliuretano padrão devem ser evitados em aplicações da classe AR — a flexibilidade da aranha adiciona folga angular que prejudica a vantagem da folga da classe de engrenagens de precisão.
Perguntas frequentes
Como escolher entre as classes de backlash Standard, A e AR?
→ Identifique o orçamento de erro angular da sua aplicação para um único movimento de posicionamento seguido de inversão. Se o seu sistema puder tolerar até 0,5° de zona morta na mudança de direção (gerenciada pelo controlador), a classe Standard é suficiente. Para repetibilidade mecânica dentro de 0,13° sem compensação do controlador, especifique a classe A. Para AR, a folga é suficientemente pequena para que a maioria dos controladores de servo consiga rastrear a inversão de direção dentro do seu ganho de malha de posição normal — especifique AR para juntas telescópicas, ópticas de precisão e robóticas de alta precisão.
O VRV030 é realmente autoblocante e quais relações de transmissão se qualificam para esse recurso?
→ Nas relações de 40:1 (eficiência de 0,60) e 80:1 (eficiência de 0,32), o VRV030 apresenta travamento automático em condições estáticas — o ângulo de avanço é inferior ao ângulo de atrito da malha lubrificada com graxa. Nas relações de 20:1 (eficiência de 0,71) e inferiores, o acionamento reverso é possível sob carga de saída suficiente. Para acionamentos de posicionamento de painéis solares e antenas que precisam manter a posição sob ação do vento, especifique 40:1 ou 80:1. Sempre verifique o travamento automático em sua aplicação específica — a temperatura de operação, as condições de lubrificação e a vibração podem afetar o ângulo de atrito na prática.
Qual é o torque máximo de saída na relação de 10:1?
→ O torque máximo de saída depende da potência do motor na entrada. O VRV030 com relação de 10:1 tem uma eficiência de 0,84, portanto, o torque de saída = (potência de entrada × eficiência × 60) ÷ (2π × velocidade de saída em rpm). Com uma entrada nominal de 1.000 rpm e um motor de 10 W: torque de saída ≈ (10 W × 0,84 × 60) ÷ (2π × 100 rpm) ≈ 0,8 Nm. O torque máximo de saída contínuo é limitado pelo limite térmico da carcaça e pela carga radial máxima de saída Fr2 = 80 N — verifique se a sua combinação de carga não excede ambos os limites simultaneamente.
O VRV030 consegue funcionar continuamente com uma entrada de 3.000 rpm?
→ 3.000 rpm é a velocidade máxima de entrada nominal, não a velocidade nominal de operação contínua com carga máxima. A 3.000 rpm, deve-se verificar se a película de graxa lubrificante é adequada às condições dos mancais do eixo de entrada. Para operação contínua acima de 2.000 rpm, confirme com a Korea Ever-Power se a sua combinação específica de ciclo de trabalho e carga está dentro dos limites térmicos e de lubrificação da graxa.
O VRV030 requer um acoplamento de motor separado ou posso montar o motor diretamente?
→ O VRV030 aceita um eixo de servomotor ou motor de passo diretamente no furo de entrada — esta unidade não possui flange para o motor. É necessário um acoplamento entre o eixo do motor e o furo de entrada da caixa de engrenagens. Para aplicações de precisão da classe AR, utilize um acoplamento de feixe ou fole sem folga. Para aplicações padrão e da classe A, um acoplamento de garras padrão com uma aranha de poliuretano macio é aceitável, mas esteja ciente de que a aranha adiciona uma pequena quantidade de flexibilidade angular que contribui para a folga efetiva do sistema.
O valor da inércia refletida muda entre as unidades de classe Standard e AR?
→ Não. A inércia refletida é uma função da geometria da engrenagem (número de dentes, distância entre centros, material), que não se altera entre as classes de folga. Os valores de 1,60–1,79 × 10⁻⁷ kg·m² na tabela aplicam-se às três classes na mesma relação. A distinção entre as classes afeta apenas a tolerância de fabricação do engrenamento, e não a distribuição física da massa dos componentes rotativos.
O que os clientes dizem
Kim Hyun-wooEngenheiro de Robótica, Seoul Automation Systems (2024)
"Substituímos as unidades Ondrives P15-20A na junta do pulso de um robô manipulador. A folga do VRV030-20A testada foi de 0,11° — dentro da especificação de classe A (≤0,13°). O comportamento do servo após a substituição foi idêntico ao original. Economizamos 40% no custo unitário em comparação com a peça original."
Parque Sang-ilEngenheiro Mecânico, Fabricante de Equipamentos Solares OEM em Daejeon (3º trimestre de 2024)
"Utilizamos o VRV030 na classe padrão 40:1 em nossos acionamentos azimutais para rastreadores solares de eixo único. A eficiência de 0,60 nessa relação significa que o motor precisa ser um pouco maior do que uma caixa de engrenagens helicoidal, mas o travamento automático na relação 40:1 elimina a necessidade de um freio separado e simplifica o sistema elétrico. Estamos operando 180 unidades em campo sem nenhuma falha na caixa de engrenagens em 18 meses."
Choi Byung-junEngenheiro de Controle, Busan Defence Systems Integrator (2025)
"Classe AR especificada para aplicação de apontamento de antena. Folga medida de 0,05° no primeiro lote — melhor que a especificação de ≤0,066°. Os dados de inércia refletida na especificação foram cruciais para nossa documentação de comissionamento do servo. O produto foi entregue com certificação dimensional completa."
Lee Jun-seokEngenheiro de Compras, Gyeonggi-do Precision Equipment Co. (4º trimestre de 2024)
"A tabela de eficiência por relação de transmissão foi o que nos convenceu a experimentar este fornecedor. Pouquíssimos fornecedores de redutores de rosca sem-fim publicam dados de eficiência por relação de transmissão nesta escala. A eficiência de 0,32 a 80:1 é exatamente o que precisávamos para o cálculo térmico do nosso sistema de servoacionamento."
Yoon Gi Tae, Integrador de Automação, Incheon (2024)
"Utilizei o VRV030 com relação de 13,333:1, classe A, para o eixo de posicionamento de uma máquina de dosagem. A lubrificação com graxa é uma vantagem prática — não há preocupações com o nível de óleo quando a máquina é reorientada para diferentes formatos de produto. O custo de substituição em comparação com o equipamento original foi suficientemente atraente para qualificar e aprovar o produto em um único ciclo de produção."
Han Soo-yeonComprador Técnico, Fornecedor de Equipamentos de Pesquisa em Seul (final de 2024)
"Encomendei um motor de platina padrão 8:1 para um microscópio — não é uma aplicação típica de robótica ou energia solar, mas o tamanho compacto e o movimento suave eram exatamente o que precisávamos. A entrega foi feita em 5 dias úteis. Nenhum problema após 8 meses de uso em laboratório."
Informação adicional
| Editor | Cxm |
|---|
Produtos relacionados
-

Redutor de engrenagem helicoidal com entrada por eixo EP-NRV | Entrada por eixo maciço
-

Redutor de engrenagem helicoidal WPWKT com braço de torque | Acionamento montado no eixo
-

Redutor de engrenagem helicoidal VRV030 | Substituição do Ondrives Rino P70
-

Caixa de engrenagens sem-fim WPWDK | Série WP
-

Redutor de engrenagem sem-fim VRV030 | Substituição do Ondrives Rino P45
-

Redutor de engrenagem helicoidal WPWO | 19–2745 Nm, 0,12–33,2 kW Universal
-

Redutor de engrenagem sem-fim MRV050 | 0,06–7,5 kW, Relação 5–100:1
-

Redutor de engrenagem helicoidal EP-NMRV com flange de saída

























