VRV030 Snäckväxelreducerare | Ondrives Rino P15 Ersättning, IP67

VRV030 precisionssnäckväxel, vikt 0,15 kg, max ingångsvarvtal 3 000 rpm, fettsmord med Shell Gadus S5. Sex utväxlingsförhållanden från 6,666:1 till 80:1. Tre noggrannhetsklasser för glapp — standard (≤0,50°), A (≤0,13°), AR (≤0,066°) — med full verkningsgrad och reflekterade tröghetsdata per utväxling. Dimensionskompatibel ersättning för Ondrives- och Rino P15-serien.
VRV030 Precisions snäckväxelreducerare
VRV030 är en miniatyrprecisionsmodell snäckväxelreducerare byggd för högprecisionsdrivningar med begränsat utrymme inom industriell robotteknik, solspårningssystem och militär utrustning. Enheten väger 0,15 kg i sin minsta form och accepterar ingångshastigheter upp till 3 000 rpm. Den är fettsmord med Shell Gadus S5 V4P 2.5 som standard – vilket eliminerar den oljenivåhantering som oljebadsenheter kräver i riktningar där nätet skulle vara intermittent exponerat.
Tre noggrannhetsklasser för motspel finns tillgängliga för varje förhållande: standard (utgångs-motspel ≤0,50°), A-klass (≤0,13°) och AR-klass (≤0,066°). Detta trenivåsystem matchar precisionskravet direkt med detaljkostnaden – en solpanelpositioneringsdrivning som tolererar 0,30° glapp kan använda standardklassen; en robotarm som kräver repeterbar mikropositionering bör specificera klass AR. Fullständiga data för motspel, effektivitet och reflekterad tröghetströghet för varje förhållande och klass visas i tabellform nedan.
VRV030 är en dimensionskompatibel ersättning för snäckväxelserien Ondrives & Rino P15. Korea Ever-Power tillverkar VRV030 som ett eftermarknadsalternativ – inte som en OEM-del. För originalkomponenter från Ondrives & Rino, kontakta originaltillverkaren. För en kostnadseffektiv och kompatibel ersättning med samma prestandadata är VRV030 en direkt leverans.
Tekniska specifikationer
Specifikationstabellen nedan täcker de mekaniska, smörj- och belastningsparametrar som gäller för alla VRV030-varianter. Tabellen för förhållande/effektivitet/tröghetsgrad som följer ger prestandadata per förhållande för varje glappklass – använd både när du verifierar lämplighet och skriver din inköpsspecifikation.
| Specifikation | Värde |
|---|---|
| Vikt | 0,15 kg (P15-ram) |
| Nominell ingångshastighet [S1 T₂n] n1nom | 1 000 min⁻¹ (r/min) |
| Max. ingångshastighet n1max | 3 000 min⁻¹ (r/min) |
| Smörjning | Fett — Shell Gadus S5 V4P 2.5 |
| Max driftstemperatur | ≈ 60°C |
| Max. radiell ingångsbelastning Fr1 | 10 N |
| Max. radiell utgångsbelastning Fr2 | 80 N |
| Max. utgående axiell belastning Fa2 | 30 N |
P15-seriens tabell över utväxling, effektivitet, glapp och tröghetsmoment
Artikelnummersuffix: standard = utgångsspel ≤0,50°; En = ≤0,13° (minskat glapp); AR = ≤0,066° (precisionsspel). Verkningsgrad (ηz) mätt vid nominell ingångshastighet. Reflekterad tröghet vid ingången i kg·m². Alla ledningsriktningar: Höger.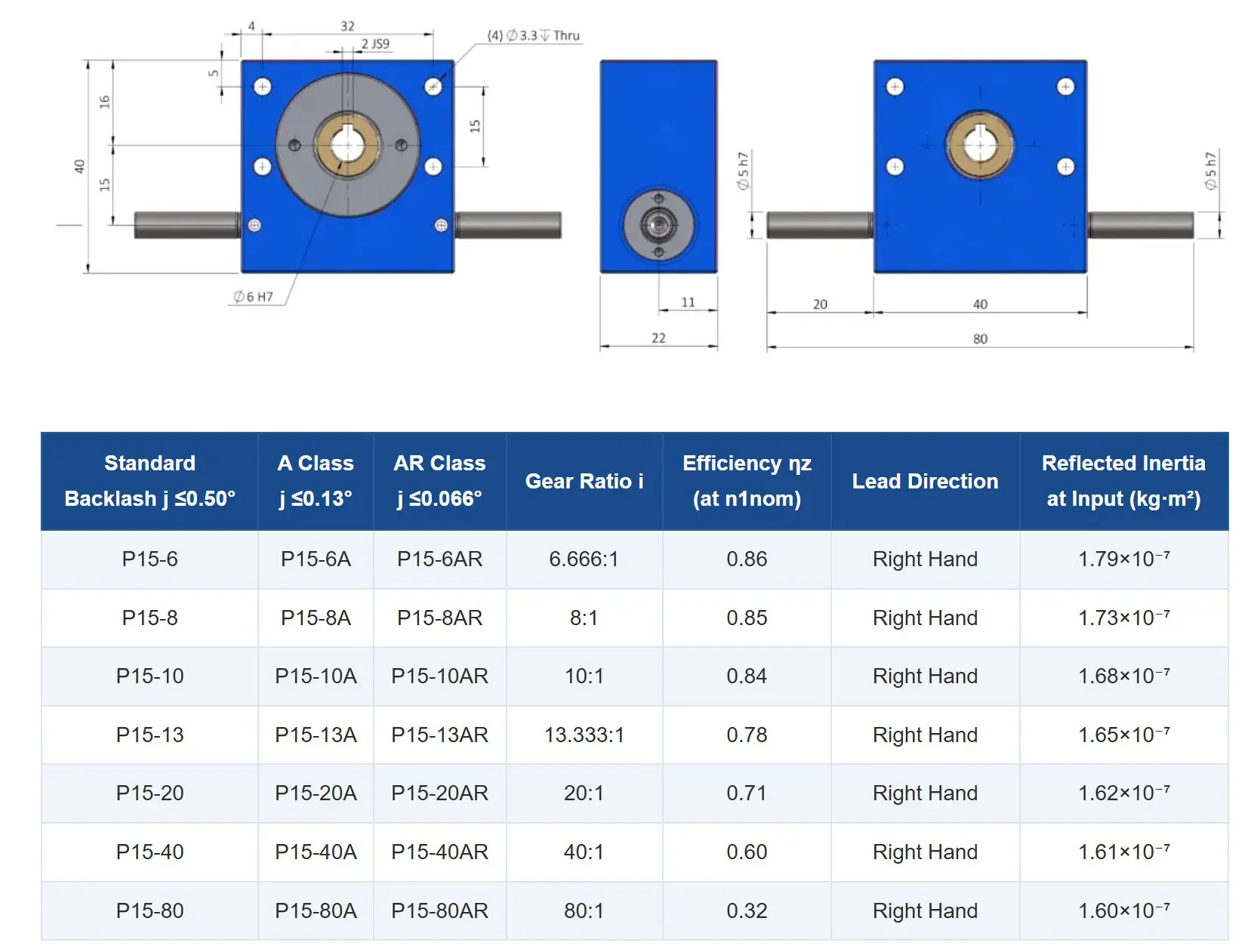
Obs: Testning i din applikation är nödvändig. Bekräfta driftcykler och lämplighet med dina egna beräkningar. Värdena som anges är endast vägledande. Kylning kan krävas beroende på applikationens driftcykel och omgivningstemperatur.
Att välja rätt motreaktionsklass
Glapp i en snäckväxel är vinkelspelet vid utgående axel när ingående axel hålls stilla. Lägre glapp innebär mer positionsrepeterbarhet vid reversering – men det innebär också snävare tillverkningstoleranser, kortare inkörningsperioder och en högre enhetskostnad. Att specificera en klass som är snävare än vad din applikation faktiskt kräver är en onödig kostnad; att specificera för löst skapar positionsfel som styrsystemen måste kompensera för elektroniskt.
| Klass | Bakslag vid utgång | Typisk tillämpning | Relativ kostnad |
|---|---|---|---|
| Standard | ≤ 0,50° | Enkelriktade drivningar; solföljare som inte reverserar under belastning; transportbandsindexering med korrigering av positionsåterkoppling | Lägst |
| En | ≤ 0,13° | Robotarmsleder som kräver repeterbar positionering vid reversering; antennriktade drivenheter; precisionsdosering för industriella ändamål | Medium |
| AR | ≤ 0,066° | Högprecisionsrobotarmar; militära optiska system; teleskopazimutdrivningar; mikrodispenserings- och inspektionsutrustning | Högsta |
Som en praktisk guide: om din servoregulator kompenserar för glapp elektroniskt och du kör i en dominerande riktning, är standardklassen vanligtvis tillräcklig. Om du behöver sann mekanisk positioneringsrepeterbarhet vid riktningsomkastning – som i en robotled som återgår till en utgångspunkt – ange klass A eller AR beroende på din vinkelfelsbudget. Verkningsgradssiffrorna i tabellen visar att snävare klasser inte signifikant minskar utgångseffektiviteten (jämför 0,86 vid 6,666:1 standard mot samma värde vid klass AR) – verkningsgradsskillnaden vid samma förhållande mellan klasserna är försumbar.
VRV030:s designstyrkor

✦ Tre motreaktionsklasser — Matcha precision med budget
Standard-, A- och AR-klasserna täcker hela precisionsområdet från generell positionering till högprecisionsrobotar i samma hölje. Genom att välja rätt klass undviker man att överspecificera precision där det inte behövs och att underspecificera där det är viktigt.
✦ Fettsmörjning — Orienteringsoberoende
Shell Gadus S5 fettsmörjning innebär ingen oljenivå att hantera och inga begränsningar vad gäller oljepositionens orientering. VRV030 kan monteras i alla lägen – horisontellt, vertikalt, inverterat eller vinklat – utan problem med oljebassängens förskjutning. Avgörande för robotarmleder som roterar i godtyckliga orienteringar.
✦ 3 000 rpm Max ingång — Kompatibel med höghastighetsservo
Den maximala ingångshastigheten på 3 000 rpm är kompatibel med direkt servomotorkoppling utan primärt reduktionssteg. Ett borstlöst DC-servo som körs med 2 000 rpm och en 20:1 VRV030 levererar 100 rpm uteffekt – en vanlig konfiguration i robotstyrda leder och tiltdrivna solpaneler.
✦ Gjutet hus i ett stycke — Inriktningsintegral
Det gjutna huset i ett stycke upprätthåller snäck-till-hjul-uppriktning utan behov av shims eller externa uppriktningsfixturer. Detta är samma konstruktionsprincip som används i avancerade precisionsväxellådor till en bråkdel av kostnaden – borr-i-ett-metoden garanterar axelparallellitet och lagersätets koncentricitet inom husets gjutgodstoleranser.
✦ Effektivitetsdata publicerade per förhållande
Många leverantörer av miniatyrväxellådor publicerar en enda effektivitetssiffra för serien. VRV030-tabellen listar uppmätt effektivitet för varje utväxling – från 0,86 vid 6,666:1 ner till 0,32 vid 80:1. Detta är viktigt för motorns termiska dimensionering: ett servo vid 80:1 måste leverera 3 gånger ingångseffekten för samma utgående arbete jämfört med konfigurationen 6,666:1.
✦ Reflekterad tröghetsdata — Servojusteringsreferens
Den reflekterade trögheten vid ingången (ungefär 1,60–1,79 × 10⁻⁷ kg·m²) publiceras för varje förhållande. Denna siffra är avgörande för att justera servomotorns förstärkning – regleringenjören behöver veta hur mycket lasttröghet motorn ser vid sin axel, vilket är lasttrögheten ÷ förhållandet² plus växellådans reflekterade tröghet. För höghastighetsservoslingor är denna distinktion viktig.
Primära tillämpningar
▸ Industrirobotik — Led- och ändeffektordrifter

Robotarms handledsleder, verktygsväxlingsställdon och drivenheter för detaljmanipulation kräver vanligtvis kompakta kugghjul med högt vridmoment i godtyckliga orienteringar. VRV030:s fettsmörjning hanterar alla monteringsvinklar; dess ingångshastighet på 3 000 rpm och tre glappklasser täcker både höghastighetssveprörelser (lägre utväxling, standardklass) och precisionspositioneringsleder (högre utväxling, A- eller AR-klass). Vid 20:1 med en verkningsgrad på 0,71 levererar en 50 W servomotor cirka 35 W mekanisk uteffekt – tillräckligt för en kompakt gripdon eller handledsställdon i en hanteringsrobot.
▸ Solenergi — Panelspårning och Azimut-drivningar

Enaxliga och tvåaxliga solföljare kräver exakt panelvinkeljustering i både höjd och azimut. Frekvensomriktaren måste hålla panelpositionen under vindbelastning när den inte styrs – vid förhållanden på 20:1 och högre är VRV030 självlåsande (effektiviteten 20:1 på 0,71 är över självlåsningströskeln, men vid 40:1 med effektivitet 0,60 och 80:1 med effektivitet 0,32 gäller praktisk självlåsning). Standardspelsklass är vanligtvis tillräcklig för solföljning – panelvinkeltoleransen för de flesta PV-system är flera gånger bredare än standardspelssiffran på 0,50°.
▸ Militär-, övervaknings- och precisionsoptisk utrustning
Styrställdon för obemannade fordon, antennriktningsmekanismer och elektrooptiska sensorpositioneringssystem kräver både kompakthet och exakt, repeterbar vinkelpositionering. VRV030 AR-klassen vid 10:1 eller 13.333:1 – med glapp under 0,066° – ger detta i ett hölje på 0,15 kg. Den publicerade reflekterade tröghetsmomentet gör det möjligt för servodrivtekniker att modellera systemdynamik noggrant under styrslingdesign, vilket är ett krav för den verifieringsdokumentation som militär utrustningsupphandling vanligtvis kräver.
Ondrives & Rino P15 Ersättningsguide
VRV030 tillverkas som en kompatibel eftermarknadsersättning för snäckväxeln Ondrives & Rino P15. Korea Ever-Power är inte anslutet till eller auktoriserat av Ondrives & Rino — VRV030 är en oberoende produkt utformad för att vara dimensions- och prestandakompatibel som en drop-in-ersättning. För originalkomponenter från Ondrives & Rino, kontakta tillverkaren.
| Kontrollpunkt | Ondrives & Rino P15 | VRV030 | Kompatibel? |
|---|---|---|---|
| Produktserie / ram | P15 | VRV030 | ✓ Samma ramklass |
| Tillgängliga förhållanden | 6.666, 8, 10, 13.333, 20, 40, 80 | 6.666, 8, 10, 13.333, 20, 40, 80 | ✓ Fullständig matchning |
| Motreaktionskurser | Standard / A / AR | Standard / A / AR | ✓ Fullständig matchning |
| Nominell ingångshastighet | 1 000 varv/min | 1 000 varv/min | ✓ Match |
| Max. ingångshastighet | 3 000 varv/min | 3 000 varv/min | ✓ Match |
| Smörjning | Fett | Shell Gadus S5 V4P 2.5 | ✓ Kompatibel klass |
| Max. radiell utgångsbelastning Fr2 | 80 N | 80 N | ✓ Match |
| OEM / eftermarknad | Original tillverkardel | Eftermarknadsbyte | — Verifiera för din ansökan |
Vi rekommenderar att du testar VRV030 i din specifika tillämpning innan du byter ut vagnparken. Måttritningar och fullständiga specifikationer finns tillgängliga på begäran via Koreas ständiga makt för att bekräfta passform innan din första beställning.
Matchade drivkomponenter
VRV030-växellådan är en komponent i en precisionsdrivenhet. Snäckhjulets slitageegenskaper, snäckaxelns precisionsgrad och motorkopplingstyp påverkar alla systemets långsiktiga positioneringsnoggrannhet. Korea Ever-Power levererar hela komponentuppsättningen för denna växellådsfamilj.

⚙ Snäckhjul — maskmaskhjul.topp
Precisionssnäckhjul för VRV030-ramen, tillverkade för att matcha centrumavståndet och tandprofilen för standard-, A- och AR-spelsklasserna. Ange förhållande och spelklass vid förfrågan – vi bekräftar profil- och ytfinishspecifikationen som avgör vilken klass ersättningshjulet kvalificerar för.
⚙ Snäckaxel — snäckhjulsdrev.topp
Slipade snäckaxlar till den toleransklass som krävs för A- eller AR-spelspecifikationen. Precisionsslipning enligt DIN 3974 med lämplig noggrannhetsklass avgör den slutliga glappsgraden – en snävare profilnoggrannhet på snäckaxeln är en av de två primära hävstångarna (tillsammans med hjulprofilnoggrannhet) för att uppnå AR-klassen.
⚙ Axelkopplingar
För precisionsservodrivningar via VRV030 är glappfria balk- eller bälgkopplingar standardanslutningen på ingångssidan mellan servomotorns axel och växellådans ingångshål. Käftkopplingar med vanliga polyuretanspindlar bör undvikas i AR-klassapplikationer — spindlarnas eftergivlighet ger vinkelglapp som undergräver glappfördelen hos precisionsväxlar i branschen.
Vanliga frågor
Hur väljer jag mellan Standard-, A- och AR-spelklasser?
→ Identifiera din applikations vinkelfelsbudget för en enskild positioneringsrörelse följt av reversering. Om ditt system kan tolerera upp till 0,5° dödzon vid riktningsändring (hanteras av regulatorn) är standardklassen tillräcklig. För mekanisk repeterbarhet inom 0,13° utan regulatorkompensering, specificera klass A. För AR är glappet tillräckligt litet för att de flesta servoregulatorer kan spåra genom riktningsomkastning inom sin normala positionsloopförstärkning – specificera AR för teleskop-, precisionsoptiska och högnoggrannhetsrobotförbindningar.
Är VRV030 verkligen självlåsande och vilka utväxlingsförhållanden gäller?
→ Vid 40:1 (effektivitet 0,60) och 80:1 (effektivitet 0,32) är VRV030 effektivt självlåsande under statiska förhållanden – stigningsvinkeln är under friktionsvinkeln för det fettsmorda nätet. Vid 20:1 (effektivitet 0,71) och lägre är bakåtstyrning möjlig vid tillräcklig utgående belastning. För sol- och antennpositioneringsdrivningar som måste hålla positionen under vindbelastning, ange 40:1 eller 80:1. Verifiera alltid självlåsningen i din specifika applikation – driftstemperatur, smörjförhållande och vibrationer kan alla påverka friktionsvinkeln i praktiken.
Vad är det maximala utgångsmomentet vid förhållandet 10:1?
→ Det maximala utgångsmomentet beror på motoreffekten vid ingången. VRV030 har en verkningsgrad på 0,84 vid 10:1, så utgångsmoment = (ingångseffekt × verkningsgrad × 60) ÷ (2π × utgångsvarvtal i rpm). Vid 1 000 rpm nominell ingång med en 10 W motor: utgångsmoment ≈ (10 W × 0,84 × 60) ÷ (2π × 100 rpm) ≈ 0,8 Nm. Det maximala kontinuerliga utgångsmomentet begränsas av husets termiska gräns och den maximala radiella utgångsbelastningen Fr2 = 80 N — bekräfta att din lastkombination inte överskrider båda gränserna samtidigt.
Kan VRV030 köras kontinuerligt med 3 000 rpm ingångsvarvtal?
→ 3 000 rpm är det nominella maximala ingångsvarvtalet, inte en kontinuerlig driftklassning vid full belastning. Vid 3 000 rpm måste fettsmörjningsfilmen verifieras att den är lämplig för ingångsaxelns lagerförhållanden. För kontinuerlig drift över 2 000 rpm, bekräfta med Korea Ever-Power att din specifika arbetscykel och belastningskombination ligger inom fettfyllningens termiska och smörjande gränser.
Kräver VRV030 en separat motorkoppling eller kan jag montera motorn direkt?
→ VRV030 accepterar en servo- eller stegmotoraxel direkt i ingångshålet – det finns ingen motorflänsyta på denna enhet. En koppling mellan motoraxeln och växellådans ingångshål krävs. För precisionsapplikationer i AR-klass, använd en balk- eller bälgkoppling med nollspel. För standard- och A-klassapplikationer är en standard käftkoppling med en mjuk polyuretankoppling acceptabel, men var medveten om att kopplingen ger en liten mängd vinkeleftergivlighet som bidrar till systemets effektiva spel.
Ändras den reflekterade tröghetssiffran mellan enheter i standard- och AR-klass?
→ Nej. Den reflekterade trögheten är en funktion av kugghjulets geometri (tänderantal, centrumavstånd, material) som inte ändras mellan glappklasserna. Värdena 1,60–1,79 × 10⁻⁷ kg·m² i tabellen gäller för alla tre klasserna med samma förhållande. Klasskillnaden påverkar endast tillverkningstoleransen för kugghjulsingreppet, inte den fysiska massfördelningen för de roterande komponenterna.
Vad kunderna säger
Kim Hyun-woo, Robotingenjör, Seoul Automation Systems (2024)
"Bytte ut Ondrives P15-20A-enheter på en hanteringsrobots handledsled. VRV030-20A-spelet testades vid 0,11° – inom ≤0,13° A-klassspecifikationen. Servoslingans beteende efter utbyte var identiskt med originalet. Sparade 40% på enhetskostnaden jämfört med OEM-delen."
Park Sang-il, Maskiningenjör, Daejeon Solar Equipment OEM (Q3 2024)
"Vi använder VRV030 med förhållandet 40:1 i standardklassen på våra enaxliga solföljardrivna azimutdrivningar. Verkningsgraden på 0,60 vid det förhållandet innebär att motorn blir lite större jämfört med en spiralväxel, men det självlåsande beteendet vid 40:1 eliminerar behovet av en separat broms och förenklar det elektriska systemet. Vi kör 180 enheter i fält utan växellådsfel på 18 månader."
Choi Byung-jun, Kontrollingenjör, Busan Defence Systems Integrator (2025)
"Specificerad AR-klass för en antennriktningstillämpning. Uppmätt glapp på 0,05° på den första satsen – bättre än specifikationen ≤0,066°. De reflekterade tröghetsdata i specifikationen var avgörande för vår dokumentation för servodrifttagning. Produkten levererades med fullständig dimensionscertifiering."
Lee Jun-seok, Inköpsingenjör, Gyeonggi-do Precision Equipment Co. (kvartal 4 2024)
"Verkningsgradstabellen per förhållande var det som övertygade oss att prova den här leverantören. Väldigt få leverantörer av snäckväxlar publicerar effektivitetsdata per förhållande i den här skalan. Verkningsgraden på 0,32 vid 80:1 är precis vad vi behövde för termisk budgetering av vårt servosystem."
Yoon Gi-tae, Automationsintegratör, Incheon (2024)
"Använde VRV030 vid 13.333:1 A-klass för en dispenseringsmaskins positioneringsaxel. Fettsmörjningen är en praktisk fördel — inga problem med oljenivån när maskinen omorienteras för olika produktformat. Ersättningskostnaden jämfört med OEM var tillräckligt övertygande för att kvalificera och godkänna inom en produktcykel."
Han Soo-yeon, Teknisk inköpare, leverantör av forskningsutrustning i Seoul (slutet av 2024)
"Beställde 8:1 standardklass för ett mikroskopbordsdrivsystem — inte en typisk robot- eller solcellsapplikation, men den kompakta storleken och den smidiga rörelsen var precis vad vi behövde. Leveransen tog 5 arbetsdagar. Inga problem efter 8 månaders laboratorieanvändning."
Ytterligare information
| Redaktör | Cxm |
|---|
Relaterade produkter
-

EP-NRV Axelingångssnäckväxel Reducer | Solid axelingång
-

WPWDKO Snäckväxelreducerare | Dubbelkilad axel + Vertikal utgång
-

WPWKO Vertikal axel snäckväxelreducerare | Axel-nedåtgående utgång
-

EP-NMRV-VS Snäckväxel med dubbla ingångar | Synkroniserad drivning och pulsgivare-förlängning
-

VRV030 Snäckväxelreducerare | Ondrives Rino P45 Ersättning
-

MRV050 Snäckväxelreducerare | 0,06–7,5 kW, Utväxling 5–100:1
-

EP-NMRV snäckväxelreducerare med utgående fläns
-

RV-serien snäckväxelreducerare / synkron snäckväxelmotor för skruvdomkraft

























