VRV030 ussülekande reduktor | Ondrives Rino P15 asendus, IP67

VRV030 täppis-usskäigukast, kaal 0,15 kg, maksimaalne sisendkiirus 3000 p/min, määritud Shell Gadus S5 määrdega. Kuus ülekandearvu vahemikus 6,666:1 kuni 80:1. Kolm lõtku täpsusklassi – standard (≤0,50°), A (≤0,13°), AR (≤0,066°) – täieliku efektiivsuse ja peegeldunud inertsi andmetega ülekandearvu kohta. Mõõtmetelt ühilduv asendus Ondrives ja Rino P15 seeriale.
VRV030 täppis-ussikäigu reduktor
VRV030 on miniatuurne täppis- ussikäigu reduktor loodud ülitäpsete ja ruumipiirangutega ajamite jaoks tööstusrobotites, päikesejälgimissüsteemides ja sõjavarustuses. Väikseimal kujul 0,15 kg kaaluv seade talub sisendkiirusi kuni 3000 p/min ja on standardvarustuses määritud Shell Gadus S5 V4P 2.5 õliga – see välistab õlitaseme reguleerimise, mida õlivannis töötavad seadmed vajavad orientatsioonides, kus võrk oleks vahelduvalt nähtav.
Iga suhte jaoks on saadaval kolm lõtku täpsusklassi: standardne (väljundlõtk ≤0,50°), A-klass (≤0,13°) ja AR-klass (≤0,066°). See kolmeastmeline süsteem sobitab täpsusnõude otse detaili maksumusega – päikesepaneelide positsioneerimisajam, mis talub 0,30° lõtku, saab kasutada standardklassi; robotkäsi, mis vajab korduvat mikropositsioneerimist, peaks määrama klassi AR. Iga suhte ja klassi täielikud lõtku, efektiivsuse ja peegeldunud inertsi andmed on esitatud allpool tabelis.
VRV030 on Ondrives & Rino P15 ussülekande reduktori seeria mõõtmetega ühilduv asendus. Korea Ever-Power toodab VRV030 järelturu alternatiivina, mitte originaalosana. Ondrives & Rino originaalkomponentide osas võtke ühendust algse tootjaga. Hinna poolest konkurentsivõimelise ja sama jõudlusandmetega ühilduva asenduse saamiseks on VRV030 otsetarvitav.
Tehnilised andmed
Allolev spetsifikatsioonide tabel hõlmab mehaanilisi, määrimis- ja koormusparameetreid, mis kehtivad kõigile VRV030 variantidele. Järgnev suhte/efektiivsuse/inertsi tabel annab iga lõtkuklassi kohta jõudlusandmed suhte kohta – kasutage nii sobivuse kontrollimisel kui ka ostuspetsifikatsiooni kirjutamisel.
| Spetsifikatsioon | Väärtus |
|---|---|
| Kaal | 0,15 kg (P15 raam) |
| Nom. sisendkiirus [S1 T₂n] n1nom | 1000 min⁻¹ (p/min) |
| Maksimaalne sisendkiirus n1max | 3000 min⁻¹ (p/min) |
| Määrimine | Määre — Shell Gadus S5 V4P 2.5 |
| Maksimaalne töötemperatuur | ≈ 60 °C |
| Maksimaalne sisendradiaalkoormus Fr1 | 10 N |
| Maksimaalne väljundradiaalkoormus Fr2 | 80 N |
| Maksimaalne väljundaksiaalkoormus Fa2 | 30 N |
P15 seeria suhtarvu, efektiivsuse, lõtku ja inertsi tabel
Osanumbri järelliited: standard = väljundlõtk ≤0,50°; A = ≤0,13° (vähendatud lõtk); AR = ≤0,066° (täppislõtk). Efektiivsus (ηz) mõõdetuna nimisisendkiirusel. Peegeldunud inerts sisendil (kg·m²). Kõik juhtsuunad: paremakäeline.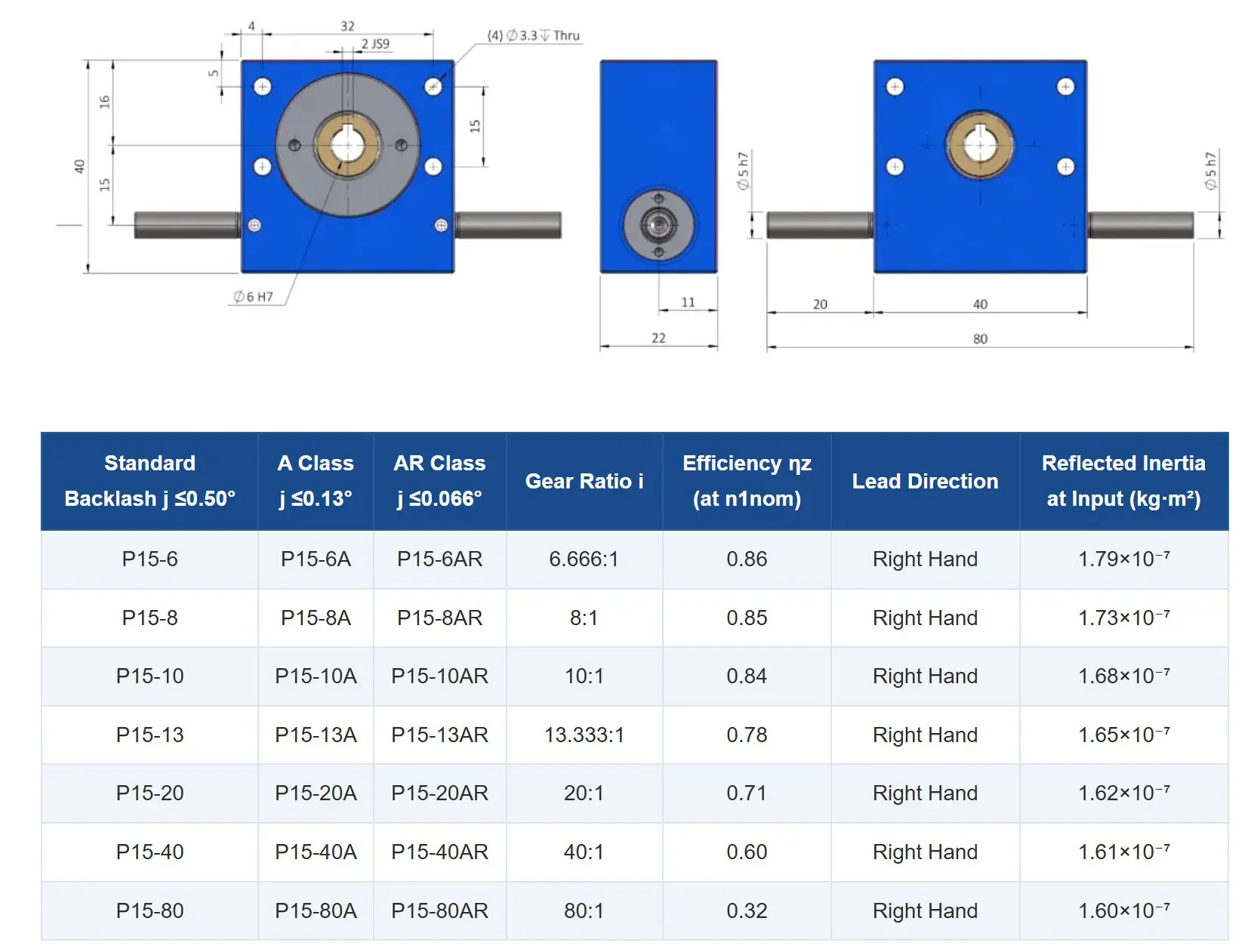
Märkus: Testimine teie rakenduses on vajalik. Kontrollige töötsükleid ja sobivust oma arvutuste abil. Loetletud väärtused on ainult soovituslikud. Jahutus võib olla vajalik olenevalt rakenduse töötsüklist ja ümbritseva õhu temperatuurist.
Õige tagasilöögiklassi valimine
Ussülekande lõtk on väljundvõlli nurklõtk, kui sisendvõll on paigal. Väiksem lõtk tähendab suuremat positsioonilist korduvust tagurpidi pööramisel – aga see tähendab ka kitsamaid tootmistolerantse, lühemaid sissetöötamisperioode ja kõrgemat ühikuhinda. Tihedama ülekandearvu määramine, kui teie rakendus tegelikult nõuab, on tarbetu kulu; liiga lõtv ülekanne tekitab positsioonivigu, mida juhtimissüsteemid peavad elektrooniliselt kompenseerima.
| Klass | Tagasilöök väljundis | Tüüpiline rakendus | Suhteline maksumus |
|---|---|---|---|
| Standardne | ≤ 0,50° | Ühesuunalised ajamid; päikesejälgijad, mis koormuse all tagurpidi ei liigu; konveieri indekseerimine positsiooni tagasiside korrektsiooniga | Madalaim |
| A | ≤ 0,13° | Robotkäe liigendid, mis vajavad korduvat positsioneerimist ümberpööramisel; antenni suunamise ajamid; täppis-tööstuslik doseerimine | Keskmine |
| AR | ≤ 0,066° | Ülitäpsed robotkäed; sõjaväe optilised süsteemid; teleskoobi asimuutajamid; mikrodoseerimis- ja kontrollseadmed | Kõrgeim |
Praktilise juhisena: kui teie servokontroller kompenseerib tagasilööki elektrooniliselt ja liigute ühes valdavas suunas, piisab tavaliselt standardklassist. Kui vajate suuna muutmisel tõelist mehaanilist positsioneerimise korduvust – nagu robotliigendi puhul, mis naaseb tugipunkti –, määrake klass A või AR, olenevalt teie nurkvea eelarvest. Tabelis olevad efektiivsusnäitajad näitavad, et rangemad klassid ei vähenda oluliselt väljundefektiivsust (võrrelge 0,86 standardi 6,666:1 juures vs sama väärtus klassis AR) – efektiivsuse erinevus sama suhte juures klasside vahel on tühine.
VRV030 disaini tugevused

✦ Kolm tagasilöögiklassi – sobitage täpsus eelarvega
Standard-, A- ja AR-klassid hõlmavad kogu täpsusvahemiku alates üldisest positsioneerimisest kuni suure täpsusega robootikani samas korpuses. Õige klassi valimine väldib ülemäärast täpsust seal, kus see pole vajalik, ja alamääramist seal, kus see on oluline.
✦ Määrdeõlitamine — orientatsioonist sõltumatu
Shell Gadus S5 määrdeõli tähendab, et õlitaset pole vaja hallata ega õli asendi orientatsiooni piiranguid. VRV030 saab paigaldada mis tahes asendis – horisontaalselt, vertikaalselt, ümberpööratult või nurga all – ilma õlivanni nihkumise probleemideta. See on kriitilise tähtsusega robotkäe liigeste jaoks, mis pöörlevad suvalistes suundades.
✦ Maksimaalne sisendkiirus 3000 p/min — ühildub kiirete servomootoritega
Maksimaalne sisendkiirus 3000 p/min on ühilduv otsese servomootori sidestusega ilma primaarse reduktsiooniastmeta. Harjadeta alalisvooluservo, mis töötab kiirusel 2000 p/min ja millel on 20:1 VRV030, annab väljundkiiruseks 100 p/min – see on tavaline konfiguratsioon robotliigendites ja päikesepaneelide kallutusajamites.
✦ Ühes tükis valatud korpus — joondamine integreeritud
Ühes tükis vormitud korpus säilitab ussi ja ratta vahelise joonduse ilma kiile või väliste joondamisseadmeteta. See on sama konstruktsioonipõhimõte, mida kasutatakse tipptasemel täppiskäigukastides murdosa hinnaga – ava-ühes-seadistusmeetod tagab võlli paralleelsuse ja laagripesa kontsentrilisuse korpuse valamistolerantside piires.
✦ Tõhususandmed avaldatakse suhte kohta
Paljud miniatuursete käigukastide tarnijad avaldavad selle vahemiku kohta ühtse efektiivsusnäitaja. VRV030 tabelis on loetletud iga ülekandearvu kohta mõõdetud efektiivsus – alates 0,86-st suhtega 6,666:1 kuni 0,32-ni suhtega 80:1. See on oluline mootori termilise suuruse määramisel: servomootori suhe suhtega 80:1 peab sama väljundtöö jaoks andma 3 korda suuremat sisendvõimsust võrreldes konfiguratsiooniga 6,666:1.
✦ Peegeldatud inertsiandmed — servo häälestamise viide
Iga suhte kohta avaldatakse sisendil peegeldunud inerts (ligikaudu 1,60–1,79 × 10⁻⁷ kg·m²). See näitaja on oluline servomootori võimenduse häälestamiseks – juhtimisinsener peab teadma, kui palju koormuse inertsi mootor oma võllil näeb, mis on koormuse inerts ÷ suhe² pluss käigukasti peegeldunud inerts. Kiirete servoahelate puhul on see erinevus oluline.
Peamised rakendused
▸ Tööstusrobootika — liigese- ja efektorajamid

Robotkäe randmeliigendid, tööriistavahetusajamid ja detailide manipuleerimise ajamid vajavad tavaliselt kompaktset ja suure pöördemomendiga hammasülekannet suvalises orientatsioonis. VRV030 määrdeõlitussüsteem sobib igale paigaldusnurgale; selle sisendkiirus 3000 p/min ja kolm lõtkuklassi hõlmavad nii kiireid pühkimisliigutusi (madalam suhe, standardklass) kui ka täppispositsioneerimisliigesid (kõrgem suhe, A- või AR-klass). Suhte 20:1 ja efektiivsuse 0,71 juures annab 50 W servomootor ligikaudu 35 W mehaanilist väljundvõimsust – see on piisav kompaktse haaratsi või randmeliigendi jaoks käsitsemisrobotis.
▸ Päikeseenergia — paneelide jälgimine ja asimuutajamid

Ühe- ja kaheteljelised päikesejälgijad vajavad paneeli täpset nurga reguleerimist nii kõrguse kui ka asimuudi suunas. Ajam peab hoidma paneeli asendit tuulekoormuse all, kui sellele käske ei anta – suhetel 20:1 ja suurematel on VRV030 iselukustuv (20:1 efektiivsus 0,71 on üle iselukustuva läve, kuid suhetel 40:1 efektiivsusega 0,60 ja 80:1 efektiivsusega 0,32 kehtib praktiline iselukustuv). Päikesejälgimiseks piisab tavaliselt standardsest lõtkuklassist – enamiku päikesepaneelide süsteemide paneeli nurga tolerants on mitu korda suurem kui standardne 0,50° lõtkuväärtus.
▸ Sõjaväe-, seire- ja täppisoptikaseadmed
Mehitamata sõidukite rooliajamid, antenni suunamismehhanismid ja elektrooptilised andurite positsioneerimissüsteemid nõuavad nii kompaktsust kui ka täpset ja korratavat nurkpositsioneerimist. VRV030 AR klass suhtega 10:1 või 13,333:1 – lõtkuga alla 0,066° – tagab selle 0,15 kg korpuses. Avaldatud peegeldunud inerts võimaldab servoajamite inseneridel süsteemi dünaamikat täpselt modelleerida juhtimisahela projekteerimise ajal, mis on nõue sõjavarustuse hankemisel tavaliselt nõutava kontrolldokumentatsiooni jaoks.
Ondrives & Rino P15 asendusjuhend
VRV030 on toodetud Ondrives & Rino P15 ussiülekande reduktori ühilduva järelturu asendusena. Korea Ever-Power ei ole Ondrives & Rinoga seotud ega volitatud – VRV030 on sõltumatu toode, mis on loodud mõõtmete ja jõudluse poolest ühilduvaks koheseks asenduseks. Ondrives & Rino originaalkomponentide kohta võtke ühendust tootjaga.
| Kontrollpunkt | Ondrives & Rino P15 | VRV030 | Ühildub? |
|---|---|---|---|
| Tooteseeria / raam | P15 | VRV030 | ✓ Sama raamiklass |
| Saadaval olevad suhtarvud | 6.666, 8, 10, 13.333, 20, 40, 80 | 6.666, 8, 10, 13.333, 20, 40, 80 | ✓ Täielik vaste |
| Tagasilöögiklassid | Standardne / A / AR | Standardne / A / AR | ✓ Täielik vaste |
| Nom. sisendkiirus | 1000 p/min | 1000 p/min | ✓ Matš |
| Maksimaalne sisendkiirus | 3000 p/min | 3000 p/min | ✓ Matš |
| Määrimine | Määre | Shell Gadus S5 V4P 2.5 | ✓ Ühilduv klass |
| Maksimaalne väljundradiaalkoormus Fr2 | 80 N | 80 N | ✓ Matš |
| OEM / järelturg | Originaal tootja osa | Järelturu asendus | — Kinnitage oma rakenduse jaoks |
Soovitame enne seadmepargi väljavahetamist VRV030 seadet teie konkreetses rakenduses testida. Mõõtmejoonised ja täielikud spetsifikatsioonid on soovi korral saadaval aadressil Korea Ever-Power sobivuse kinnitamiseks enne esimest tellimust.
Sobivad ajamikomponendid
VRV030 käigukast on täppisülekande üks komponent. Ussiratta kulumisomadused, ussivõlli täppisklass ja mootori siduri tüüp mõjutavad kõik süsteemi pikaajalist positsioneerimistäpsust. Korea Ever-Power tarnib selle käigukasti perekonna jaoks täieliku komponentide komplekti.

⚙ Ussiratas — ussiratas.ülemine
VRV030 raami täppis-ussirattad, mis on valmistatud vastama standardsete, A- ja AR-lõtkuklasside keskpunktide vahekaugusele ja hambaprofiilile. Päringu esitamisel esitage suhe ja lõtkuklass – me kinnitame profiili ja pinnaviimistluse spetsifikatsiooni, mis määrab, millisesse klassi asendusratas kvalifitseerub.
⚙ Ussivõll — ussirattaülekanne.ülemine
Ussvõllide lihvimine tolerantsiklassini A või AR, mis on nõutav lõtkuspetsifikatsiooni jaoks. Täppislihvimine vastavalt standardile DIN 3974 vastavas täpsusklassis määrab lõpliku lõtkuastme – ussvõlli väiksem profiilitäpsus on üks kahest peamisest hoovast (lisaks rattaprofiili täpsusele) AR-klassi saavutamiseks.
⚙ Võlli sidurid
VRV030 kaudu täppis-servoajamite puhul on servomootori võlli ja käigukasti sisendava vahel standardseks sisendühenduseks lõtkuvabad tala- või lõõtsühendused. AR-klassi rakendustes tuleks vältida standardsete polüuretaanist ämblikhammastega lõualuude ühendusi – ämbliku paindlikkus lisab nurklõtku, mis vähendab täppishammasrataste klassi lõtkueelist.
Korduma kippuvad küsimused
Kuidas valida standard-, A- ja AR-lõtkuklassi vahel?
→ Määrake oma rakenduse nurkvea eelarve ühe positsioneerimisliigutuse jaoks, millele järgneb tagasipööramine. Kui teie süsteem talub suuna muutmisel kuni 0,5° surnud tsooni (mida haldab kontroller), piisab standardklassist. Mehaanilise korduvuse korral 0,13° piires ilma kontrolleri kompensatsioonita määrake klass A. AR-i puhul on lõtk piisavalt väike, et enamik servokontrollereid suudavad suuna muutmist jälgida oma normaalse positsioonisilmuse võimenduse piires – määrake AR teleskoobi, täppisoptiliste ja suure täpsusega robotliidete jaoks.
Kas VRV030 on tõeliselt iselukustuv ja millised ülekandearvud sellele vastavad?
→ Suhte 40:1 (efektiivsus 0,60) ja 80:1 (efektiivsus 0,32) korral on VRV030 staatilistes tingimustes iselukustuv – juhtnurk on alla määrdega määritud võrgu hõõrdenurga. Suhte 20:1 (efektiivsus 0,71) ja alla selle juures on tagasiliikumine piisava väljundkoormuse korral võimalik. Päikese- ja antenni positsioneerimisajamite puhul, mis peavad tuulekoormuse all asendit hoidma, määrake suhe 40:1 või 80:1. Kontrollige alati iselukustuvust oma konkreetses rakenduses – töötemperatuur, määrimistingimused ja vibratsioon võivad kõik praktikas hõõrdenurka mõjutada.
Milline on maksimaalne väljundpöördemoment ülekandearvul 10:1?
→ Maksimaalne väljundmoment sõltub mootori sisendvõimsusest. VRV030 efektiivsus suhtega 10:1 on 0,84, seega väljundmoment = (sisendvõimsus × efektiivsus × 60) ÷ (2π × väljundkiirus p/min). Nimivõimsusega 1000 p/min juures 10 W mootoriga: väljundmoment ≈ (10 W × 0,84 × 60) ÷ (2π × 100 p/min) ≈ 0,8 Nm. Maksimaalset pidevat väljundmomenti piiravad korpuse termiline piir ja maksimaalne väljundradiaalkoormus Fr2 = 80 N – veenduge, et teie koormuste kombinatsioon ei ületa mõlemat piiri samaaegselt.
Kas VRV030 saab pidevalt töötada sisendkiirusega 3000 p/min?
→ 3000 p/min on nimivõimsusega maksimaalne sisendkiirus, mitte täiskoormusel pidev töökiirus. 3000 p/min juures tuleb kontrollida, et määrdekile vastab sisendvõlli laagrite tingimustele. Pideva töökiiruse korral üle 2000 p/min kinnitage Korea Ever-Poweriga, et teie konkreetne töötsükkel ja koormuste kombinatsioon jäävad määrdetäidise termiliste ja määrimispiiride piiresse.
Kas VRV030 vajab eraldi mootoriühendust või saan mootori otse paigaldada?
→ VRV030 ühendab servo- või astmemootori võlli otse sisendavasse – sellel seadmel puudub mootori äärikupind. Mootori võlli ja käigukasti sisendava vaheline sidur on vajalik. Täppis-AR-klassi rakenduste jaoks kasutage lõtkuvaba tala- või lõõtssidurit. Standard- ja A-klassi rakenduste jaoks on vastuvõetav standardne lõualuu sidur pehme polüuretaanist ämblikuga, kuid pidage meeles, et ämblik lisab väikese nurkjäikuse, mis aitab kaasa süsteemi efektiivsele lõtkule.
Kas peegeldunud inertsi näitaja muutub standard- ja AR-klassi seadmete vahel?
→ Ei. Peegeldunud inerts on hammasratta geomeetria (hammaste arv, keskpunktide vahe, materjal) funktsioon, mis lõtkuklasside vahel ei muutu. Tabelis olevad väärtused 1,60–1,79 × 10⁻⁷ kg·m² kehtivad kõigi kolme klassi kohta sama suhtega. Klasside eristamine mõjutab ainult hammasratta hambumuse tootmistolerantsi, mitte pöörlevate komponentide füüsikalist massijaotust.
Mida kliendid ütlevad
Kim Hyun-woo, robootikainsener, Seouli automaatikasüsteemid (2024)
"Asendasin käsitsemisroboti randmeliigesel Ondrives P15-20A seadmed. VRV030-20A lõtk oli testimisel 0,11° – see jääb A-klassi spetsifikatsiooni piiresse ≤0,13°. Servosilmuse käitumine pärast vahetamist oli identne originaaliga. Võrreldes originaalosaga säästsin 40% ühikuhinna pealt."
Park Sang-il, mehaanikainsener, Daejeoni päikeseenergiaseadmete originaalvaruosade tootja (2024. aasta 3. kvartal)
„Meie ühelteljeliste päikesejälgijate asimuutajamite puhul kasutame standardklassis 40:1 VRV030 mootorit. Selle suhte juures on efektiivsus 0,60, mis tähendab, et mootor on võrreldes kaldkäigukastiga veidi suurema suurusega, kuid iselukustuv käitumine suhtega 40:1 välistab vajaduse eraldi piduri järele ja lihtsustab elektrisüsteemi. Oleme 18 kuu jooksul töötanud 180 seadet ilma käigukasti riketeta.“
Choi Byung-jun, juhtimisinsener, Busani kaitsesüsteemide integraator (2025)
"Antenni suunamise rakenduse jaoks määratud AR-klass. Esimese partii mõõdetud lõtk oli 0,05° – parem kui spetsifikatsioonis ≤0,066° esitatud väärtus. Spetsifikatsioonis esitatud peegeldunud inertsi andmed olid meie servomootorite kasutuselevõtu dokumentatsiooni jaoks kriitilise tähtsusega. Toode tarniti täieliku mõõtmete sertifikaadiga."
Lee Jun-seok, hankeinsener, Gyeonggi-do Precision Equipment Co. (2024. aasta 4. kvartal)
„Efektiivsuse tabel ülekandearvu kohta veenis meid seda tarnijat proovima. Väga vähesed ussikäigukastide müüjad avaldavad sellises ulatuses efektiivsuse andmeid ülekandearvu kohta. 0,32 efektiivsus 80:1 juures on täpselt see, mida vajasime oma servomootori süsteemi termiliseks eelarvestamiseks.“
Yoon Gi-tae, Automaatika integraator, Incheon (2024)
"Kasutasin VRV030 seadet 13,333:1 A-klassi doseerimismasina positsioneerimistelje jaoks. Määrdeõli on praktiline eelis – õlitasemega pole probleeme, kui masinat erinevate tooteformaatide jaoks ümber orienteeritakse. Asenduskulu võrreldes originaalvaruosade tootjaga oli piisavalt hea, et see ühe tootetsükli jooksul kvalifitseerida ja heaks kiita."
Han Soo-yeon, tehniline ostja, Souli uurimisseadmete tarnija (2024. aasta lõpp)
"Tellisin mikroskoobi lauaajami jaoks standardklassi 8:1 – see pole küll tüüpiline robootika- või päikeseenergiarakendus, aga kompaktne suurus ja sujuv liikumine olid just see, mida vajasime. Tarneaeg oli 5 tööpäeva. Pärast 8-kuulist laborikasutust pole probleeme tekkinud."
Lisainfo
| Toimetaja | Cxm |
|---|
Seotud tooted
-

EP-NRV võlli sisendi ussikäigu reduktor | Täisvõlli sisend
-

WPEX kaheastmeline ussikäigu reduktor | Kaheastmeline ajam
-

EP-NMRV-VS kahe sisendiga ussülekande reduktor | Sünkroonajam ja kodeerija pikendus
-

WPWDK ussikäigukast | WP seeria
-

VRV030 ussülekande reduktor | Ondrives Rino P45 vahetus
-

MRV050 ussülekande reduktor | 0,06–7,5 kW, suhe 5–100:1
-

XRV050 ussiülekande reduktor | IP67 tapmis- ja loputusseadmed
-

RV-seeria ussikäigu reduktor / sünkroonne ussikäiguga mootor kruvipistikule

























