เกียร์ทดรอบแบบหนอน เกียร์ทดรอบแบบเกลียว เกียร์ทดรอบแบบดาวเคราะห์
ตัวลดเกียร์แต่ละประเภทมีงานที่เหมาะสมและงานที่ไม่เหมาะสมอย่างชัดเจน การเปรียบเทียบนี้จะช่วยลดความซับซ้อนของตารางข้อมูลจำเพาะ และให้กรอบการทำงานที่ใช้งานได้จริงและขับเคลื่อนด้วยการใช้งานสำหรับการเลือกประเภทไดรฟ์ที่ถูกต้องสำหรับแต่ละงาน แทนที่จะเลือกใช้ตัวเลือกที่คุ้นเคยที่สุดโดยอัตโนมัติ
เหตุใดคำถามที่ว่า “ตัวลดเกียร์แบบไหนดีกว่ากัน?” จึงเป็นคำถามที่ผิด
ทีมจัดซื้อถามว่า “เราควรใช้เกียร์บ็อกซ์แบบไหนเป็นมาตรฐาน?” และทีมวิศวกรรมถามว่า “ตัวลดเกียร์แบบไหนเหนือกว่าในทางเทคนิค?” คำถามทั้งสองนำไปสู่ผลลัพธ์ที่ผิด เพราะการเลือกตัวลดเกียร์นั้นโดยพื้นฐานแล้วเกี่ยวกับการจับคู่คุณลักษณะของระบบขับเคลื่อนกับข้อกำหนดของแอปพลิเคชัน ไม่ใช่การจัดอันดับประเภทของตัวลดเกียร์ตามหลักการทั่วไป
ระบบขับเคลื่อนแบบฮาร์มอนิกช่วยลดการคลายตัวของเฟืองได้เกือบเป็นศูนย์ ชุดเกียร์ทดกำลังแบบหนอนให้การล็อคตัวเองทางกล ชุดเกียร์ทดกำลังแบบดาวเคราะห์ให้กำลังความหนาแน่นสูงในขนาดกะทัดรัด สิ่งเหล่านี้ไม่ใช่ความสามารถที่แข่งขันกัน แต่เป็นการแก้ปัญหาทางวิศวกรรมที่แตกต่างกัน ชุดเกียร์ทดกำลังที่ดีที่สุดสำหรับระบบติดตามแผงโซลาร์เซลล์นั้นแทบจะแน่นอนว่าไม่ใช่ชุดเกียร์ทดกำลังที่ดีที่สุดสำหรับแกนหุ่นยนต์ผ่าตัด และแทบจะแน่นอนว่าไม่ใช่ชุดเกียร์ทดกำลังที่ดีที่สุดสำหรับเครื่องยกในเหมืองแร่
บทความนี้เสนอโครงร่างการตัดสินใจสำหรับการจับคู่คุณลักษณะเหล่านี้กับแอปพลิเคชันเฉพาะต่างๆ รวมถึงการยอมรับอย่างตรงไปตรงมาถึงข้อจำกัดของแต่ละประเภท ไม่ใช่แค่จุดแข็งเท่านั้น เมื่ออ่านจบแล้ว คุณจะสามารถประเมินแอปพลิเคชันไดรฟ์ใดๆ เทียบกับเกณฑ์ที่เกี่ยวข้อง และเลือกตัวลดเกียร์ที่เหมาะสมทางเทคนิคได้โดยไม่ต้องขอความช่วยเหลือจากผู้เชี่ยวชาญในกรณีมาตรฐานส่วนใหญ่
ตัวลดเกียร์หลักสี่ประเภท: คุณลักษณะสำคัญโดยสังเขป
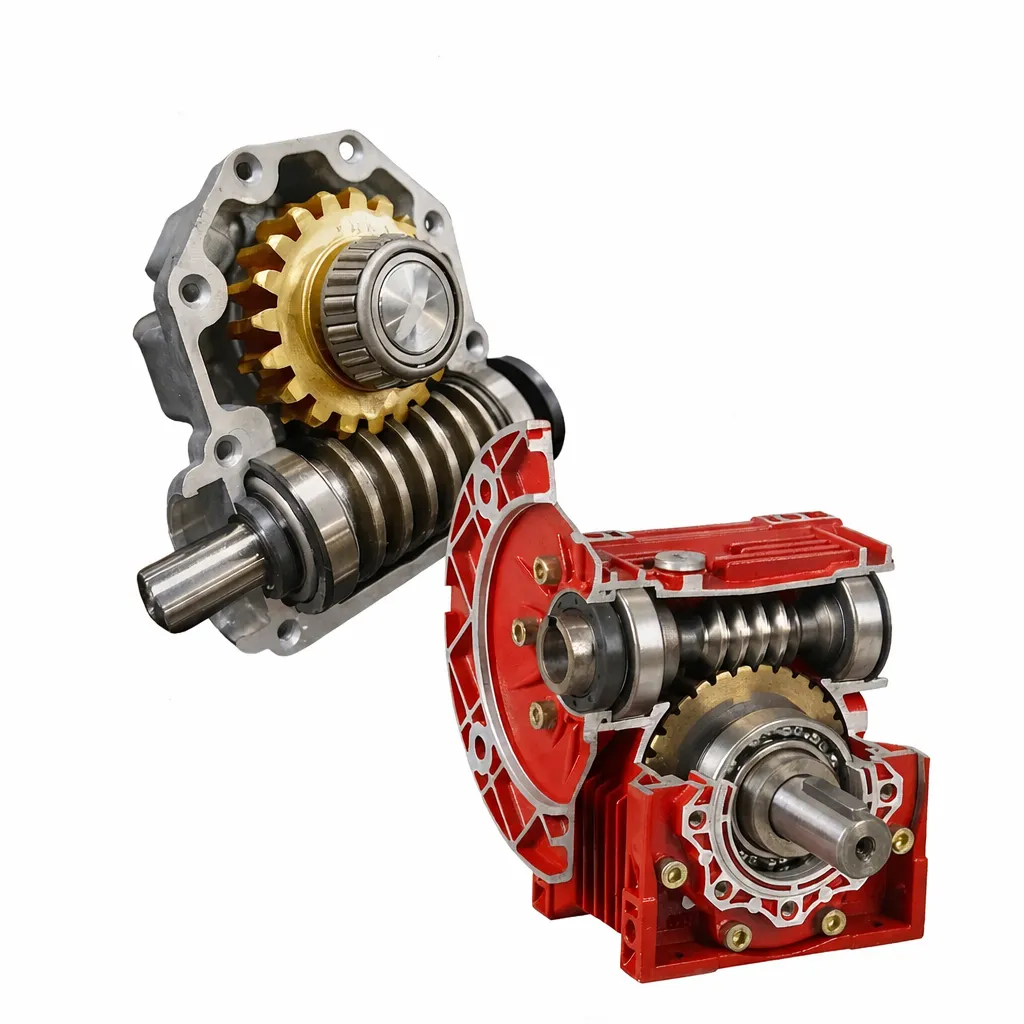
เกียร์หนอนลดรอบ
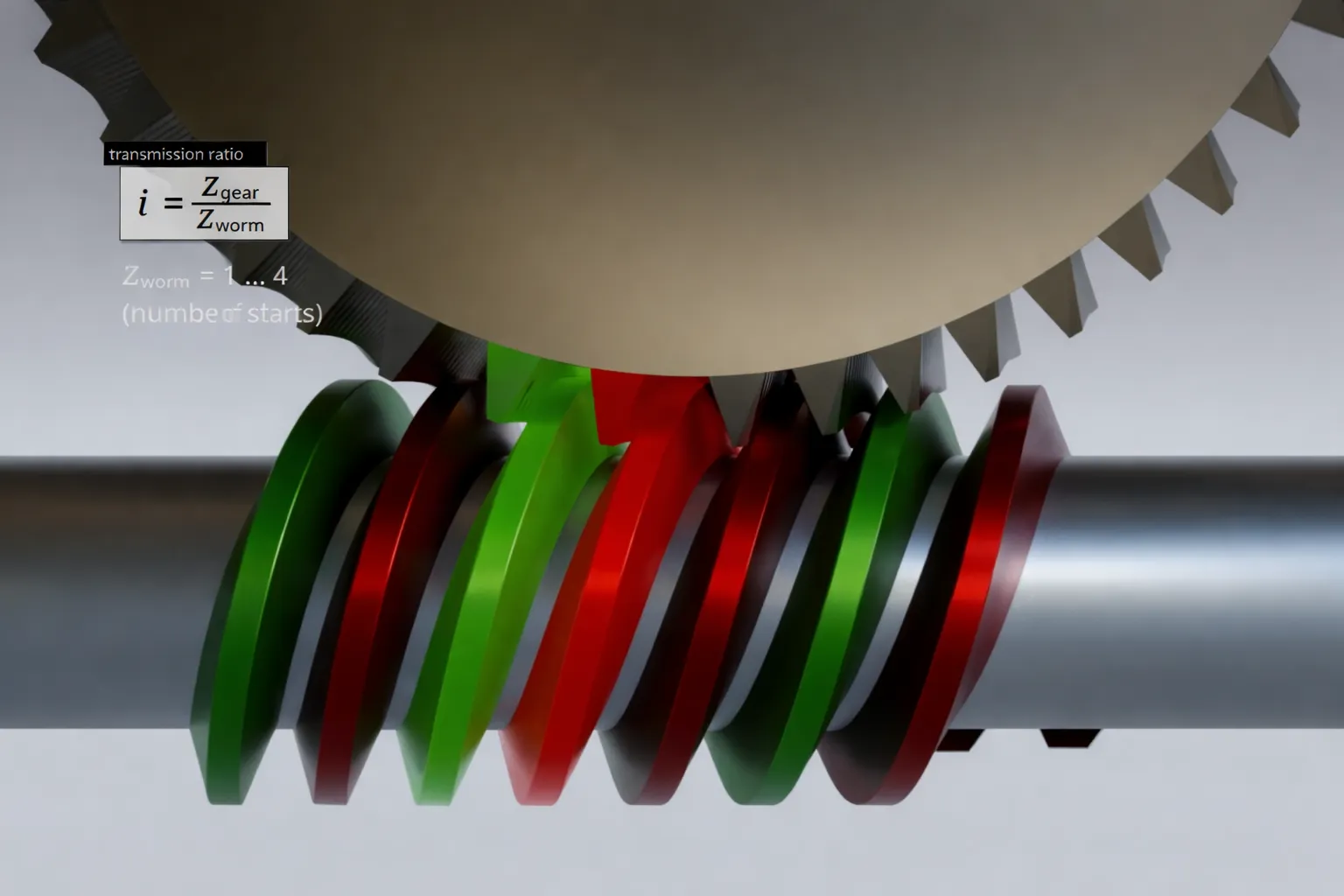
ตัวหนอน (เพลาเกลียวคล้ายสกรู) ขบกับล้อหนอนทองสัมฤทธิ์ในมุม 90 องศา การสัมผัสแบบเลื่อนที่จุดขบกันทำให้เกิด... เกียร์ทดรอบแบบหนอน ลักษณะเด่นของมันคือ การส่งออกเป็นมุมฉากเป็นมาตรฐาน อัตราส่วนลดกำลังในขั้นตอนเดียวสูง (สูงสุดถึง 100:1) และการล็อคตัวเองที่อัตราทดสูง การสัมผัสแบบเลื่อนยังทำให้เกิดข้อแลกเปลี่ยนด้านประสิทธิภาพ กล่าวคือ แรงเสียดทานที่จุดประกบกันก่อให้เกิดความร้อนซึ่งลดประสิทธิภาพเมื่อเทียบกับเฟืองแบบสัมผัสกลิ้ง
คุณสมบัติพิเศษ: ระบบล็อคตัวเอง — เพลาส่งกำลังไม่สามารถส่งกำลังย้อนกลับไปยังเพลาอินพุตได้เมื่อมอเตอร์ปิดอยู่ (ที่อัตราส่วน ≥ 20:1)
ตัวลดเกียร์แบบเกลียว
เฟืองเกลียวมีฟันที่ตัดทำมุมกับแกนเฟือง ทำให้เกิดการสัมผัสแบบกลิ้งโดยมีฟันหลายซี่ทำงานพร้อมกัน ส่งผลให้การส่งกำลังราบรื่น เสียงรบกวนต่ำ และมีประสิทธิภาพสูง ตัวลดเกียร์เกลียวแบบขั้นเดียวโดยธรรมชาติแล้วจะอยู่ในแนวเดียวกัน (เพลาอินพุตและเอาต์พุตขนานกัน) การส่งออกเป็นมุมฉากจำเป็นต้องเพิ่มเฟืองดอกจอกหรือเฟืองไฮปอยด์ที่เอาต์พุต ซึ่งเป็นการจัดเรียงแบบเกลียว-ดอกจอกหรือเกลียว-หนอนที่พบได้ทั่วไปในมอเตอร์อุตสาหกรรม
คุณสมบัติพิเศษ: ประสิทธิภาพสูงสุด (92–98%) — ตัวเลือกที่ชัดเจนเมื่อต้นทุนด้านพลังงานมีความสำคัญมากกว่าการทำงานอย่างต่อเนื่อง ซึ่งเป็นปัจจัยหลักในการออกแบบ
ตัวลดเกียร์ดาวเคราะห์
ชุดเกียร์ทดรอบแบบเฟืองดาวเคราะห์หลายตัวโคจรรอบเฟืองดวงอาทิตย์ตรงกลางภายในเฟืองวงแหวน ภาระจะถูกกระจายไปยังเฟืองดาวเคราะห์หลายตัวพร้อมกัน ทำให้ชุดเกียร์ทดรอบแบบเฟืองดาวเคราะห์มีแรงบิดสูงเป็นพิเศษ — ให้แรงบิดสูงจากตัวเรือนขนาดกะทัดรัด แรงบิดขาออกอยู่ในแนวเดียวกับแรงบิดขาเข้า สามารถทำอัตราส่วนได้ตั้งแต่ 3:1 ถึง 100:1 และการเพิ่มจำนวนขั้นจะช่วยเพิ่มอัตราส่วนให้สูงขึ้นไปอีก ประสิทธิภาพสูงอยู่ที่ 90–971 ตัน/3 แรงบิด
คุณสมบัติพิเศษ: อัตราส่วนกำลังไฟฟ้าต่อขนาดสูงสุด — เมื่อพื้นที่ว่างภายในตัวเครื่องเป็นข้อจำกัดหลัก และงบประมาณเอื้ออำนวย
เกียร์ทดรอบแบบเฟืองเฉียง
เฟืองดอกจอกส่งกำลังระหว่างเพลาที่ตัดกัน โดยทั่วไปจะทำมุม 90 องศา ทำให้เป็นตัวเลือกมุมฉากที่เหมาะสม เฟืองดอกจอกแบบเกลียว (ชนิดที่ใช้กันทั่วไปในอุตสาหกรรม) ผสมผสานความสามารถในการทำมุมฉากเข้ากับการสัมผัสแบบหมุน ทำให้มีประสิทธิภาพ 92–971 TP3T อัตราส่วนความเร็วต่อขั้นจำกัดอยู่ที่ประมาณ 1:1 ถึง 5:1 ซึ่งต้องใช้หลายขั้นสำหรับการลดอัตราส่วนสูง
ข้อจำกัดที่สำคัญ: ไม่มีระบบล็อคอัตโนมัติ — สำหรับการใช้งานที่ต้องการยึดน้ำหนักใดๆ จำเป็นต้องใช้เบรกเชิงกลแยกต่างหาก ไม่ว่าอัตราทดเกียร์จะเป็นเท่าใดก็ตาม

มิติการทำงานทั้งหก: การเปรียบเทียบแบบเคียงข้างกัน
ข้อมูลด้านล่างนี้แสดงค่าทั่วไปสำหรับโครงสร้างมาตรฐานทางอุตสาหกรรม ไม่ใช่ค่าสุดขั้วที่สามารถทำได้ด้วยการออกแบบทางวิศวกรรมแบบกำหนดเอง ควรใช้ช่วงค่าเหล่านี้สำหรับการคัดกรองเบื้องต้น และตรวจสอบกับเอกสารข้อมูลผลิตภัณฑ์เฉพาะสำหรับการกำหนดค่าขั้นสุดท้าย
| มิติ | เกียร์หนอนลดรอบ | เกลียว | ดาวเคราะห์ | เอียง |
|---|---|---|---|---|
| ช่วงประสิทธิภาพ | 60 – 90% | 92 – 98% | 90 – 97% | 92 – 97% |
| อัตราส่วนขั้นตอนเดียว | 5:1 – 100:1 | 3:1 – 25:1 | 3:1 – 100:1 | 1:1 – 5:1 |
| ล็อคตัวเอง | ใช่ (≥ 20:1) | เลขที่ | เลขที่ | เลขที่ |
| เอาต์พุตมุมฉาก | มาตรฐาน | ต้องใช้แท่นตัดขอบ | ต้องใช้แท่นตัดขอบ | มาตรฐาน |
| มีเสียงดังที่รอบการหมุนต่ำ | ต่ำ – ปานกลาง | ต่ำ | ปานกลาง | ปานกลาง – สูง |
| ราคาต่อหน่วยสัมพัทธ์ (อัตราส่วน/แรงบิดเท่ากัน) | ต่ำ – ปานกลาง | ปานกลาง | สูง | ปานกลาง – สูง |
อ่านข้อมูลประสิทธิภาพ: ช่วง 60–90% สำหรับ เกียร์ทดรอบแบบหนอน ช่องว่างนั้นกว้างกว่าที่เห็น เพราะประสิทธิภาพลดลงอย่างรวดเร็วเมื่ออัตราส่วนเพิ่มขึ้น ที่อัตราส่วน 10:1 เฟืองตัวหนอนอาจมีประสิทธิภาพ 85–90% ที่อัตราส่วน 80:1 ประสิทธิภาพอาจอยู่ที่ 60–70% อัตราส่วนที่ต่ำกว่าคือจุดที่ประสิทธิภาพของเฟืองตัวหนอนและเฟืองเกลียวใกล้เคียงกัน ช่องว่างขนาดใหญ่จะอยู่ที่อัตราส่วนสูง ซึ่งเป็นจุดที่โครงสร้างมุมฉากและคุณสมบัติการล็อคตัวเองของเฟืองตัวหนอนทำให้มันสามารถแข่งขันได้แม้จะมีช่องว่างด้านประสิทธิภาพก็ตาม
ตารางตัดสินใจการใช้งาน — การจับคู่สภาพของไดรฟ์กับประเภทของตัวลดเกียร์
เมทริกซ์นี้แสดงการจับคู่เงื่อนไขการใช้งานทั่วไปสิบประการกับประเภทตัวลดทอนตัวเลือกแรกและตัวเลือกที่สอง พร้อมเหตุผลเฉพาะสำหรับแต่ละการเลือก ใช้เป็นกรอบเริ่มต้น — แอปพลิเคชันที่ตรงตามเงื่อนไขหลายข้อพร้อมกันควรตรวจสอบการเลือกกับแต่ละแถวที่เกี่ยวข้อง
| เงื่อนไขการสมัคร | ตัวเลือกแรก | ตัวเลือกที่สอง | ตรรกะการเลือก |
|---|---|---|---|
| ความเร็วรอบเอาต์พุต < 30 รอบต่อนาที จากมอเตอร์มาตรฐาน (แบบขั้นเดียว) | หนอน | ระบบขับเคลื่อนแบบดาวเคราะห์ (2 ขั้นตอน) | กลไกแบบหนอน (Worm) สามารถทำอัตราส่วน 50:1 – 100:1 ได้ในขั้นตอนเดียว ในขณะที่กลไกแบบเกลียว (Helical) ต้องใช้ 3 ขั้นตอนขึ้นไปเพื่อให้ได้อัตราส่วนเดียวกัน |
| ชิ้นงานต้องคงตำแหน่งเดิมเมื่อมอเตอร์ดับ | หนอน (≥ 30:1) | เบรกภายนอกใดๆ + | เฉพาะหนอนเท่านั้น ตัวลดเกียร์ ให้การล็อกอัตโนมัติโดยไม่ต้องใช้ระบบเบรกไฟฟ้าแยกต่างหาก |
| เอาต์พุตมุมฉาก คำนึงถึงต้นทุน | หนอน | ขอบเกลียว | เฟืองตัวหนอนให้มุมฉากเป็นมาตรฐานในราคาประหยัดที่สุด ส่วนการปรับมุมเอียงช่วยเพิ่มประสิทธิภาพแต่มีต้นทุนสูงกว่า |
| ประสิทธิภาพการขับเคลื่อน > 90% เป็นสิ่งจำเป็น (ต้นทุนพลังงานมีความสำคัญ) | เกลียว | ดาวเคราะห์ | ทั้งแบบหนอนและแบบเอียงไม่สามารถให้ค่า >90% ได้อย่างสม่ำเสมอในทุกอัตราส่วน ในขณะที่แบบเกลียวทำได้ |
| การทำงานแบบสองทิศทางความถี่สูง (>100 ครั้ง/ชั่วโมง) | เกลียว | ดาวเคราะห์ | การเปลี่ยนแปลงอุณหภูมิของเฟืองตัวหนอนที่ความถี่การกลับทิศทางสูงจะลดข้อได้เปรียบด้านอายุการใช้งานลง |
| แรงบิดสูงสุดในขอบเขตที่จำกัด | ดาวเคราะห์ | หนอน (ในอัตราส่วนสูง) | การกระจายแรงโหลดของระบบเฟืองดาวเคราะห์ไปยังเฟืองดาวเคราะห์หลายตัว ทำให้ได้แรงบิดสูงสุดต่อกิโลกรัมของตัวเรือน |
| การกำหนดตำแหน่งที่แม่นยำ ความคลาดเคลื่อนในการทำซ้ำ ≤ 0.1° | ดาวเคราะห์ หรือ VRV030 AR | ไดรฟ์ฮาร์มอนิก | ระยะห่างของเฟืองตัวหนอนมาตรฐาน (0.24°) ไม่เพียงพอ จำเป็นต้องใช้ VRV030 Class AR (0.066°) หรือเฟืองดาวเคราะห์ |
| สภาพแวดล้อมกลางแจ้ง เปียกชื้น หรือต้องล้างทำความสะอาด (IP65+) | เวิร์ม (IP65/67) | เฟืองดาวเคราะห์สแตนเลส | ชุดเกียร์ทดรอบแบบหนอนมีจำหน่ายในระดับการป้องกัน IP67 (ซีรีส์ XRV050) ส่วนชุดเกียร์ทดรอบแบบเฟืองดาวเคราะห์ที่มีระดับการป้องกัน IP เทียบเท่ากันนั้นมีราคาสูงกว่ามาก |
| ความเร็วรอบต่ำมาก (< 5 รอบต่อนาที) จากมอเตอร์มาตรฐาน | หนอน (สองระยะ) | เกลียวหลายขั้นตอน | ท่อหนอนสองขั้นตอน WPEX ให้ประสิทธิภาพการบีบตัวสูงถึงหลายพันเท่าในตัวเรือนเดียว โดยไม่ต้องใช้ข้อต่อกลาง |
| รับแรงกระแทกสูงและมีแรงบิดเอาต์พุตสูง (> 5,000 นิวตันเมตร) | หนอนเกลียวหรือหนอน WP | ดาวเคราะห์ (ขนาดใหญ่พิเศษ) | เหล็กหล่อซีรีส์ WP เกียร์ทดรอบแบบหนอน สามารถรับแรงกระแทกได้ดีเนื่องจากตัวเรือนมีความแข็งแรง เปรียบเทียบกับใบมีดแบบเกลียวเฉียงที่แรงบิดเท่ากันสำหรับการใช้งานที่ต้องการประสิทธิภาพสูง |

ความเข้าใจผิดทั่วไป 3 ประการเกี่ยวกับการเลือกประเภทตัวลดเกียร์
ข้อความทั้งสามนี้ปรากฏบ่อยครั้งในการสนทนาเกี่ยวกับการจัดซื้อจัดจ้างและการสนทนาทางเทคนิค แต่ละข้อความมีข้อเท็จจริงเพียงบางส่วน ซึ่งจะกลายเป็นความเข้าใจผิดหากนำไปใช้โดยปราศจากบริบทที่ครบถ้วน

“ชุดเกียร์ทดรอบแบบเฟืองตัวหนอนนั้นไม่มีประสิทธิภาพ ควรเปลี่ยนไปใช้ชุดเกียร์ทดรอบแบบเฟืองเกลียวแทน”
ความจริงเพียงบางส่วน: ชุดเกียร์ทดกำลังแบบหนอนมีประสิทธิภาพน้อยกว่าชุดเกียร์ทดกำลังแบบเกลียวที่อัตราทดเกียร์เดียวกัน ที่อัตราทด 80:1 ชุดเกียร์หนอนจะมีประสิทธิภาพอยู่ที่ 60–70% ในขณะที่ชุดเกียร์เกลียวที่อัตราทดเดียวกันจะมีประสิทธิภาพอยู่ที่ 87–92% ในหลายๆ ขั้นตอน
สิ่งที่ขาดไป: ระบบขับเคลื่อนแบบเกลียวที่อัตราส่วน 80:1 ต้องใช้เกียร์อย่างน้อยสามขั้นขึ้นไป ข้อต่อเพลาตัวกลาง และความยาวในการติดตั้งมากกว่าระบบขับเคลื่อนแบบหนอนอย่างน้อย 40% หากต้องการเอาต์พุตเป็นมุมฉาก จะต้องใช้เกียร์เอียงเพิ่มอีกขั้น ระบบโดยรวม รวมถึงขนาดมอเตอร์ ข้อต่อ และโครงสร้างการติดตั้ง มักจะช่วยลดช่องว่างด้านต้นทุนพลังงานลงได้มากเมื่อเปรียบเทียบตลอดอายุการใช้งาน 10 ปี ระบบขับเคลื่อนแบบหนอนมีประสิทธิภาพต่ำกว่าอย่างแท้จริง แต่ช่องว่างด้านประสิทธิภาพไม่ได้หมายความว่าต้นทุนจะสูงขึ้นจนคุ้มค่ากับการเลือกใช้ทางเลือกอื่นเสมอไป
การจัดวางภาพที่ถูกต้อง: เมื่อต้นทุนพลังงานต่อเนื่องเป็นเกณฑ์การเลือกที่สำคัญที่สุด และความแตกต่างด้านประสิทธิภาพแสดงถึงต้นทุนการดำเนินงานที่แท้จริงในระดับใหญ่ ตัวเลือกแบบขดลวดเกลียวจึงคุ้มค่ากับราคาที่สูงกว่า สำหรับการใช้งานระดับเบาถึงปานกลางส่วนใหญ่ ช่องว่างด้านประสิทธิภาพเป็นปัจจัยที่เกิดขึ้นจริง แต่มีผลเพียงเล็กน้อย
“เกียร์ทดรอบแบบดาวเคราะห์มีความแม่นยำกว่า ดังนั้นจึงเหมาะสำหรับระบบอัตโนมัติมากกว่าเสมอ”
ความจริงเพียงบางส่วน: ชุดเกียร์ทดรอบแบบดาวเคราะห์มาตรฐานมีระยะคลอนน้อยกว่าชุดเกียร์ทดรอบแบบหนอนมาตรฐาน โดยทั่วไปจะมีระยะคลอน 3–8 อาร์คนาที เทียบกับ 14–15 อาร์คนาที (0.24°) สำหรับเกียร์ทดรอบแบบหนอนมาตรฐาน
สิ่งที่ขาดไป: แอปพลิเคชันระบบอัตโนมัติส่วนใหญ่มีค่าความคลาดเคลื่อนในการกำหนดตำแหน่งที่อยู่ในช่วงที่ระบบเฟืองตัวหนอนมาตรฐานสามารถทำได้ โต๊ะกำหนดตำแหน่งแบบใช้สกรูนำที่มีค่าความคลาดเคลื่อน ±0.05 มม. จะมีข้อผิดพลาดเชิงเส้นเพียง 0.003 มม. จากระยะคลายตัวของตัวลดเกียร์เฟืองตัวหนอนมาตรฐานที่ระยะห่างของสกรูมาตรฐาน ซึ่งถือว่าน้อยมาก ตัวลดเกียร์แบบดาวเคราะห์ก็อยู่ในแนวเดียวกันเช่นกัน สำหรับการใช้งานขับเคลื่อนมุมฉาก การเพิ่มขั้นตอนเฟืองเอียงเพื่อให้ได้เอาต์พุตมุมฉากจะเพิ่มต้นทุนและความซับซ้อน ซึ่งทำให้ข้อดีที่เห็นได้ชัดของตัวลดเกียร์แบบดาวเคราะห์สำหรับรูปทรงเรขาคณิตของการติดตั้งเฉพาะนั้นหายไป
การจัดวางภาพที่ถูกต้อง: ใช้การคำนวณระยะคลายตัวเพื่อพิจารณาว่าแอปพลิเคชันนั้นต้องการอะไรจริงๆ หากการคำนวณแสดงว่าระยะคลายตัวของเฟืองตัวหนอนมาตรฐานส่งผลให้เกิดข้อผิดพลาดในการกำหนดตำแหน่งที่อยู่ในเกณฑ์ที่ยอมรับได้ การระบุให้ใช้เฟืองดาวเคราะห์จะเพิ่มต้นทุนโดยไม่เพิ่มประสิทธิภาพ หากการคำนวณแสดงว่าค่าความคลาดเคลื่อนค่อนข้างแคบ เฟืองตัวหนอนความแม่นยำสูง (VRV030 Class A หรือ AR) หรือเฟืองดาวเคราะห์จึงเป็นตัวเลือกที่เหมาะสม
“ระบบขับเคลื่อนแบบเกลียวกำลังเข้ามาแทนที่ระบบขับเคลื่อนแบบเฟืองตัวหนอน — นี่คือแนวโน้มของอุตสาหกรรม”
ความจริงเพียงบางส่วน: ระบบขับเคลื่อนแบบผสมผสานระหว่างเฟืองเกลียวและเฟืองตัวหนอน ได้ครองส่วนแบ่งการตลาดอย่างมีนัยสำคัญในงานที่รุ่นก่อนหน้าใช้ระบบขับเคลื่อนแบบเฟืองตัวหนอนเพียงอย่างเดียว ในงานลำเลียงและผสมวัสดุอุตสาหกรรมที่ต้องการกำลังสูง ประสิทธิภาพและข้อดีด้านเสียงรบกวนของระบบขับเคลื่อนแบบเฟืองเกลียว ทำให้การอัพเกรดเป็นระบบที่คุ้มค่าในระยะยาว
สิ่งที่ขาดไป: คุณสมบัติการล็อกตัวเองของหนอน ตัวลดเกียร์ ไม่มีระบบขับเคลื่อนแบบเกลียวใดเทียบเท่าได้ในอัตราส่วนเดียวกันโดยไม่ต้องใช้เบรกภายนอก สำหรับงานประเภทสำคัญที่ต้องอาศัยการล็อคตัวเอง เช่น สายพานลำเลียงแบบเอียง รอก กลไกการปรับแต่ง ระบบขับเคลื่อนแบบหนอนยังคงใช้ต่อไป เพราะเป็นวิธีแก้ปัญหาที่ถูกต้องตามหลักกลไก การอ้างว่าระบบขับเคลื่อนแบบเกลียวสามารถใช้แทนระบบขับเคลื่อนแบบหนอนในงานที่ต้องการการยึดน้ำหนักได้นั้น จำเป็นต้องระบุว่าฟังก์ชันการยึดน้ำหนักได้ย้ายไปอยู่ที่ใด ซึ่งมักจะเป็นเบรกแม่เหล็กไฟฟ้า (ต้นทุนเพิ่มขึ้น การบำรุงรักษาเพิ่มขึ้น) หรือการออกแบบงานใหม่
การจัดวางภาพที่ถูกต้อง: ตลาดไม่ได้ละทิ้งระบบขับเคลื่อนแบบเฟืองตัวหนอน แต่กำลังคัดแยกการใช้งานให้ชัดเจนยิ่งขึ้น โดยบางแอปพลิเคชันที่ต้องการกำลังสูงและใช้งานต่อเนื่องจะเปลี่ยนไปใช้แบบเฟืองเกลียว ในขณะที่แอปพลิเคชันแบบล็อคตัวเองยังคงใช้แบบเฟืองตัวหนอนต่อไป
นอกเหนือจากราคาซื้อ: ต้นทุนรวมในการเป็นเจ้าของตลอด 10 ปี
โดยทั่วไปแล้ว ราคาซื้อตัวลดเกียร์จะคิดเป็น 3–81 ตันของต้นทุนระบบขับเคลื่อนทั้งหมดตลอดอายุการใช้งาน 10 ปี เมื่อรวมการใช้พลังงานแล้ว การเปรียบเทียบจะเปลี่ยนแปลงไปอย่างมากเมื่อคุณคำนึงถึงองค์ประกอบต้นทุนทั้งหมด:

การคำนวณต้นทุนรวมในการเป็นเจ้าของ (TCO) ในระยะเวลา 10 ปี: มอเตอร์ 2.2 กิโลวัตต์, ใช้งาน 8 ชั่วโมงต่อวัน, 250 วันต่อปี
ราคาอ้างอิงค่าไฟฟ้า: 130 วอน/กิโลวัตต์ชั่วโมง (อัตราค่าไฟฟ้าอุตสาหกรรมโดยประมาณของเกาหลี) การใช้งาน: การขับเคลื่อนแบบทำมุมฉาก, ต้องการอัตราส่วน 80:1, ไม่จำเป็นต้องมีระบบล็อคอัตโนมัติ, สภาพแวดล้อมปานกลาง
| องค์ประกอบต้นทุน | เกียร์หนอนลดรอบ | ขอบเกลียว | หมายเหตุ |
|---|---|---|---|
| ราคาซื้อต่อหน่วย | ~$200 | ~$420 | เฟืองเฉียงเกลียวพร้อมเอาต์พุตมุมฉาก แรงบิดเทียบเท่า |
| ประสิทธิภาพที่ 80:1 | ~72% | ~91% | ประสิทธิภาพการทำงานแบบผสมผสานของการตัดแบบเกลียวหลายขั้นตอนและการตัดเฉียง |
| พลังงานป้อนเข้าประจำปี | 6,111 กิโลวัตต์ชั่วโมง | 4,835 กิโลวัตต์ชั่วโมง | P_input = 2.2 kW / ประสิทธิภาพ × 8 ชั่วโมง × 250 วัน |
| ค่าใช้จ่ายด้านพลังงานประจำปี | ~$611 | ~$484 | ที่ $0.10/kWh |
| ค่าใช้จ่ายด้านพลังงานในระยะเวลา 10 ปี | $6,110 | $4,840 | Helical ช่วยประหยัดค่าใช้จ่ายได้ 1,270 ปอนด์ในระยะเวลา 10 ปี |
| เปลี่ยนถ่ายน้ำมันเครื่อง + บำรุงรักษา (ทุก 10 ปี) | ~$180 | ~$280 | ระบบเฟืองเกลียวต้องเปลี่ยนถ่ายน้ำมันมากกว่า (หลายขั้นตอน) |
| ต้นทุนรวมในการเป็นเจ้าของ (TCO) ในระยะเวลา 10 ปี | ~$6,490 | ~$5,540 | ข้อดีของเกลียว: $950 นานกว่า 10 ปี |
| เพิ่มกลับเข้าไปหากต้องการระบบล็อคอัตโนมัติ: รางเกลียวต้องใช้เบรกแม่เหล็กไฟฟ้า (~$180 ยูนิต + $120 การบำรุงรักษา) = เพิ่ม $300 เข้าไปใน TCO ของรางเกลียว → ช่องว่างแคบลงเหลือ $650 หรือ 10% ของ TCO รวม |
ระบบขับเคลื่อนแบบเกลียวเฉียงเป็นตัวเลือกที่มีต้นทุนรวมในการเป็นเจ้าของ (TCO) ต่ำกว่าในตัวอย่างนี้ ประมาณ 1,495,000 พันล้านปอนด์ในระยะเวลา 10 ปี หรือประมาณ 151,300 พันล้านปอนด์ของต้นทุนตลอดอายุการใช้งาน นี่เป็นข้อได้เปรียบที่แท้จริง อย่างไรก็ตาม ข้อได้เปรียบนี้มีขนาดเล็กกว่าที่การเปรียบเทียบราคาซื้อ (ราคาต่อหน่วยสูงกว่า 2.1 เท่า) บ่งชี้ ว่าข้อได้เปรียบนั้นจะคุ้มค่ากับการลงทุนที่สูงขึ้นหรือไม่นั้น ขึ้นอยู่กับการบัญชีต้นทุนของโครงการระหว่างต้นทุนการลงทุนกับต้นทุนการดำเนินงาน
สำหรับการใช้งานที่ทำมุมฉากและต้องการระบบล็อคอัตโนมัติ ซึ่งเป็นรูปแบบการใช้งานจริงที่พบได้ทั่วไป ตัวเลือกแบบเกลียวเอียงต้องใช้เบรกแม่เหล็กไฟฟ้า ซึ่งจะทำให้ช่องว่างแคบลงไปอีก สำหรับการใช้งานที่ใช้งานน้อยชั่วโมงต่อวัน การประหยัดพลังงานก็จะลดลงตามสัดส่วน เกียร์ทดรอบแบบหนอน มีต้นทุนรวมในการเป็นเจ้าของ (TCO) ที่แข่งขันได้ในแอปพลิเคชันส่วนใหญ่ ไม่ใช่แค่กรณีต้นทุนต่ำที่เห็นได้ชัดเท่านั้น ตัวเลขที่เฉพาะเจาะจงขึ้นอยู่กับรอบการทำงาน ต้นทุนพลังงาน และว่าจำเป็นต้องใช้คุณสมบัติการล็อคตัวเองหรือไม่
วิธีนำเสนอตัวเลือกตัวลดเกียร์ของคุณให้แก่วิศวกรออกแบบ
วิศวกรจัดซื้อบางครั้งต้องเผชิญกับความจำเป็นในการหาเหตุผลมาสนับสนุนการตัดสินใจของตน เกียร์ทดรอบแบบหนอน การเลือกใช้วัสดุสำหรับวิศวกรออกแบบที่มักเลือกใช้วัสดุที่มีราคาแพงกว่าเป็นค่าเริ่มต้น กรอบแนวคิดต่อไปนี้จะเน้นการสนทนาบนพื้นฐานทางเทคนิคมากกว่าความชอบส่วนบุคคล:
กรอบการให้เหตุผลในการคัดเลือกแบบสามประเด็น:
1. กำหนดความต้องการ ไม่ใช่ความชอบ ระบุค่าความคลาดเคลื่อนในการกำหนดตำแหน่งที่แท้จริง ความเร็วรอบที่ต้องการ และว่าการล็อกตัวเองเป็นสิ่งจำเป็นในการใช้งานหรือไม่ “แอปพลิเคชันนี้ต้องการการกำหนดตำแหน่ง ±2 มม. ความเร็วรอบ 18 รอบต่อนาที และการคงน้ำหนักโดยไม่ต้องใช้เบรก” นี่เป็นการแยกความต้องการทางวิศวกรรมที่แท้จริงออกจากความต้องการที่คาดการณ์ไว้สำหรับตัวลดเกียร์ประเภทใดประเภทหนึ่ง
2. แสดงวิธีการคำนวณ ไม่ใช่ข้อสรุป “ชุดเกียร์ทดกำลังแบบหนอนมาตรฐานที่อัตราส่วนนี้ทำให้เกิดความคลาดเคลื่อนในการกำหนดตำแหน่งที่สกรูขับ 0.024 มม. ซึ่งค่าความคลาดเคลื่อนอยู่ที่ ±2 มม. ระบบล็อคตัวเองที่อัตราส่วน 40:1 จะรักษาระตำแหน่งไว้เมื่อมอเตอร์หยุดทำงาน ทำให้ไม่จำเป็นต้องใช้เบรกยึดแยกต่างหาก” การให้เหตุผลโดยอิงจากตัวเลขนั้นยากที่จะเปลี่ยนแปลงโดยอาศัยเพียงความชอบส่วนตัวเท่านั้น
3. นำเสนอการเปรียบเทียบต้นทุนรวมในการเป็นเจ้าของ (TCO) ไม่ใช่แค่ราคาต่อหน่วย แสดงการคำนวณ 10 ปี — ต้นทุนต่อหน่วย พลังงาน การบำรุงรักษา และส่วนประกอบเพิ่มเติมใดๆ ที่ทางเลือกอื่นต้องการ (เบรก อะแดปเตอร์ ขั้นตอนเพิ่มเติม) วิธีนี้จะเปลี่ยนการพูดคุยเรื่อง "เกียร์บ็อกซ์ที่ถูกกว่า" ไปเป็นการพูดคุยเรื่องต้นทุนตลอดอายุการใช้งาน ซึ่งเป็นกรอบทางเทคนิคที่ถูกต้อง
สำหรับแอปพลิเคชันที่ข้อมูลสนับสนุนประเภทตัวลดเกียร์แบบอื่นอย่างแท้จริง — เช่น ในกรณีที่ประสิทธิภาพมีความสำคัญ การคลายตัวของเฟืองมีน้อย หรือความหนาแน่นของพลังงานเป็นข้อจำกัด — กรอบการทำงานเดียวกันนี้จะชี้ไปยังทางเลือกอื่นอย่างถูกต้อง เป้าหมายคือการเลือกตัวขับให้เหมาะสมกับแอปพลิเคชัน ไม่ใช่การยึดติดกับความชอบส่วนตัว ในฐานะผู้เชี่ยวชาญ ผู้ผลิตเกียร์ทดรอบแบบหนอนเราให้การสนับสนุนลูกค้าด้วยข้อมูลการเลือกและการคำนวณเพื่อเปรียบเทียบ รวมถึงกรณีที่ไดรฟ์ประเภทอื่นเหมาะสมกว่าสำหรับแอปพลิเคชันเฉพาะนั้นๆ เลือกชมชุดเกียร์ทดรอบแบบหนอนของเราได้เลย สำหรับข้อมูลจำเพาะและข้อมูลมิติ
คำถามที่พบบ่อย — การเปรียบเทียบประเภทของตัวลดขนาด
ชุดเกียร์ทดรอบแบบเกลียวสามารถใช้ทดแทนชุดเกียร์ทดรอบแบบหนอนได้อย่างสมบูรณ์ในระบบลำเลียงแบบเอียงหรือไม่?
ที่ระดับกำลังไฟฟ้าต่อเนื่องเท่าใด ความแตกต่างด้านประสิทธิภาพระหว่างเฟืองตัวหนอนและเฟืองเกลียวจึงมีความสำคัญอย่างมีนัยสำคัญ?
ชุดเกียร์ทดรอบแบบเฟืองเฉียงเป็นตัวเลือกที่ดีกว่าชุดเกียร์ทดรอบแบบเฟืองตัวหนอนสำหรับการทำมุมฉากหรือไม่?
เหตุใดโรงงานแปรรูปอาหารจึงมักใช้เกียร์ทดรอบแบบหนอน ทั้งๆ ที่ประสิทธิภาพต่ำกว่า?
อัตราส่วนช่วงใดที่ถือเป็น "จุดที่เหมาะสมที่สุด" สำหรับเกียร์ทดรอบแบบหนอนเมื่อเทียบกับคู่แข่ง?
สามารถนำเกียร์ทดรอบแบบหนอนและเกียร์ทดรอบแบบเกลียวมาประกอบกันในระบบขับเคลื่อนเดียวได้หรือไม่?
ต้องการคำแนะนำเกี่ยวกับประเภทตัวลดขนาดที่เหมาะสมกับการใช้งานเฉพาะของคุณหรือไม่?
โปรดแจ้งความเร็วรอบ แรงบิด ประสิทธิภาพที่ต้องการ และระบุว่าต้องการเอาต์พุตแบบล็อคตัวเองหรือแบบมุมฉาก เราจะตรวจสอบว่าตัวลดเกียร์ประเภทใดเหมาะสมกับแอปพลิเคชันของคุณมากที่สุด รวมถึงกรณีที่แบบเกลียวหรือแบบผสม และจะให้ข้อมูลเปรียบเทียบเพื่อสนับสนุนการตัดสินใจเลือก
บรรณาธิการ: Cxm

























