วิธีการเลือกเกียร์ทดรอบแบบหนอน: คู่มือสำหรับวิศวกร
เอ เกียร์ทดรอบแบบหนอน การเลือกซื้อจากหน้าแคตตาล็อกโดยไม่ตรวจสอบแรงบิด ปัจจัยการใช้งาน ขีดจำกัดความร้อน และระดับการป้องกันน้ำและฝุ่น (IP rating) ถือเป็นความล้มเหลวที่คาดการณ์ได้ — เพียงแต่ไม่ทราบช่วงเวลาที่แน่นอน คู่มือนี้จะให้วิธีการเลือกซื้อแบบครบถ้วนทีละพารามิเตอร์ ซึ่งใช้ได้กับงานอุตสาหกรรมทุกประเภท
ผลเสียของการเลือกผิดพลาด: ตัวอย่างความล้มเหลวที่เกิดขึ้นจริง 3 กรณี
รูปแบบที่สอดคล้องกันมากที่สุดใน เกียร์ทดรอบแบบหนอน ความล้มเหลวไม่ใช่ข้อบกพร่องจากการผลิต แต่เป็นข้อผิดพลาดด้านข้อกำหนด กรณีศึกษาจากสถานที่ติดตั้งจริงสามกรณีจะแสดงให้เห็นถึงพารามิเตอร์ที่ถูกละเลยบ่อยที่สุดสามประการ

กรณีที่ 1: การจำแนกประเภทปัจจัยด้านบริการผิดพลาด — โรงงานบรรจุภัณฑ์อาหารปูซาน
สายพานลำเลียงสินค้าบรรจุภัณฑ์จากสถานีบรรจุไปยังสถานีบรรจุกล่อง ทำงานวันละ 16 ชั่วโมงในห้องเย็นอุณหภูมิ 5°C ทีมกำหนดคุณสมบัติจัดประเภทโหลดเป็น "สม่ำเสมอ" และกำหนดค่า SF = 1.0 จึงสั่งซื้อ NMRV050 อัตราส่วน 30:1 ภายในสัปดาห์ที่สอง อุณหภูมิภายในตัวเครื่องสูงขึ้นถึง 88°C เป็นประจำในช่วงเวลาที่มีการใช้งานสูงสุด ภายในเดือนที่สาม ซีลเพลาส่งกำลังเริ่มรั่วซึมน้ำมันลงบนสายพานด้านล่าง สาเหตุหลัก: สินค้าแช่แข็งบนสายพานทำให้สายพานแข็งตัวอย่างมากในช่วงเริ่มต้นการทำงาน — แรงบิดเริ่มต้นจริงนั้นมากกว่าแรงบิดที่คำนวณได้ถึง 2.3 เท่า ไม่ใช่ 1.0 เท่าตามการจัดประเภทโหลดสม่ำเสมอ การใช้ค่า SF = 1.5 กับสภาวะการเริ่มต้นการทำงานจริงจะทำให้ NMRV063 เป็นเฟรมที่ถูกต้อง
กรณีที่ 2: การละเลยข้อจำกัดด้านกำลังความร้อน — โรงงานเคมีอินชอน
เหล็กหล่อ WP80 เกียร์ทดรอบแบบหนอน ในการทดสอบอัตราส่วนกำลังอัด 40:1 ได้ใช้งานกับเครื่องผสมสารเคมีอย่างต่อเนื่องตลอด 24 ชั่วโมง โดยมีค่าแรงบิดเชิงกลอยู่ที่ 151 ตัน หลังจากใช้งานไปสี่เดือน ตัวอย่างน้ำมันพบอนุภาคสีบรอนซ์และมีสีเข้ม อุณหภูมิของน้ำมันสูงกว่า 100 องศาเซลเซียส กำลังความร้อนของมอเตอร์ WP80 ในอัตราส่วนกำลังอัด 40:1 ระบุไว้สำหรับอุณหภูมิแวดล้อม 20 องศาเซลเซียส แต่สภาพแวดล้อมจริงของโรงงานอยู่ที่ 42 องศาเซลเซียสตลอดทั้งปี เมื่ออุณหภูมิแวดล้อมสูงขึ้น กำลังความร้อนที่ระบุในแคตตาล็อกจะลดลง เนื่องจากความร้อนที่เกิดจากแรงเสียดทานของเฟืองไม่มีทางระบายออก ทำให้น้ำมันเจือจางและเสื่อมสภาพลงเมื่อเวลาผ่านไปหลายเดือน การตรวจสอบกำลังความร้อนเทียบกับอุณหภูมิแวดล้อมจริง (โดยการคำนวณเพียงครั้งเดียว) จะบ่งชี้ว่าจำเป็นต้องใช้มอเตอร์ระบายความร้อนด้วยพัดลมหรือมอเตอร์ขนาดเฟรมที่ใหญ่กว่า
กรณีที่ 3: ระดับการป้องกันมลพิษเทียบกับสภาพแวดล้อมจริง — ผู้ปลูกถ่ายพืชในจังหวัดคยองกี
อุปกรณ์ปรับระยะห่างระหว่างแถวสำหรับเครื่องปลูกผักกลางแจ้ง รุ่น NMRV040 ที่เคยใช้ในเรือนกระจกมาก่อน มีมาตรฐาน IP55 ใช้น้ำมันหล่อลื่นมาตรฐาน หลังจากฝนตกหนักครั้งแรกในฤดูใบไม้ผลิของเกาหลี ผู้ใช้งานพบว่ากลไกการปรับทำงานช้าลง น้ำมันเปลี่ยนเป็นสีเทาขุ่นเนื่องจากน้ำเข้าไป มาตรฐาน IP55 ป้องกันน้ำพุ่งแรงได้ แต่ไม่สามารถป้องกันฝนตกต่อเนื่องหลายชั่วโมงได้ เพราะการระบายความร้อนจะสร้างแรงดันลบเล็กน้อยภายในตัวเครื่อง ทำให้ความชื้นในอากาศไหลผ่านซีลที่เสื่อมสภาพ การเปลี่ยนไปใช้ซีล IP65 และน้ำมันหล่อลื่นสังเคราะห์ช่วยแก้ปัญหาได้
ความล้มเหลวแต่ละครั้งนั้นเกี่ยวข้องกับพารามิเตอร์ที่มีอยู่ในแคตตาล็อกสินค้าทุกรายการ และไม่จำเป็นต้องใช้ความรู้เฉพาะทางในการประเมิน กระบวนการที่อธิบายไว้ในส่วนที่เหลือของคู่มือนี้จะช่วยขจัดความล้มเหลวทั้งสามรูปแบบก่อนที่จะทำการสั่งซื้อ
เจ็ดพารามิเตอร์ที่สำคัญในการเลือกเกียร์ทดรอบแบบหนอนทุกตัว
ปัจจัยนำเข้าทั้งเจ็ดนี้กำหนดคุณสมบัติที่สมบูรณ์ หากปัจจัยใดปัจจัยหนึ่งไม่ทราบค่า หรือเป็นการประมาณค่าแทนที่จะคำนวณ การเลือกนั้นก็จะมีความเสี่ยงที่ยังไม่ได้รับการแก้ไข พารามิเตอร์แต่ละตัวจะได้รับการอธิบายไว้ด้านล่างพร้อมวิธีการกำหนดค่า ไม่ใช่แค่ว่ามันคืออะไร แต่ยังรวมถึงวิธีการค้นหาค่าที่เหมาะสมสำหรับแอปพลิเคชันเฉพาะของคุณด้วย
1. แรงบิดเอาต์พุตที่ต้องการ (นิวตันเมตร)
สำหรับระบบขับเคลื่อนแบบหมุน: T = P × 9550 / n_out โดยที่ P คือกำลังของเพลาในหน่วย kW และ n_out คือความเร็วรอบที่ต้องการในหน่วย rpm สำหรับระบบขับเคลื่อนแบบเชิงเส้น (สายพานลำเลียง, โซ่): T = F × r โดยที่ F คือแรงที่มีประสิทธิภาพในหน่วยนิวตัน และ r คือรัศมีของดรัมหรือเฟืองในหน่วยเมตร ควรคำนวณแรงบิดสูงสุดเสมอ — ในสภาวะเริ่มต้นหรือสภาวะโหลดสูงสุด — ไม่ใช่แค่ค่าเฉลี่ยขณะทำงานอย่างต่อเนื่อง
2. ความเร็วรอบที่ต้องการ (rpm)
อ่านจากข้อกำหนดของกระบวนการโดยตรง สำหรับสายพานลำเลียง: n_out = ความเร็วสายพาน (ม./วินาที) / (π × เส้นผ่านศูนย์กลางรอก (ม.)) × 60 สำหรับเพลาผสม: ความเร็วรอบที่ต้องการสำหรับการผสมคือเป้าหมาย ตัวเลขนี้ต้องเป็นข้อกำหนดการใช้งานจริง ไม่ใช่สิ่งที่รู้สึกว่าเหมาะสมโดยประมาณ อัตราส่วนที่เลือกจะคำนวณจากความเร็วนี้และความเร็วของมอเตอร์
3. ความเร็วรอบมอเตอร์ (rpm)
อ่านจากแผ่นป้ายชื่อมอเตอร์ มอเตอร์เหนี่ยวนำมาตรฐาน 4 ขั้ว 50 เฮิรตซ์ ทำงานที่ความเร็วประมาณ 1,450 รอบต่อนาทีภายใต้ภาระเต็มที่ (ไม่ใช่ 1,500 รอบต่อนาทีแบบซิงโครนัส) ความแตกต่าง 3.3% นี้ส่งผลต่ออัตราส่วนที่คำนวณได้ในระดับเดียวกัน การใช้ 1,450 รอบต่อนาทีในการคำนวณอัตราส่วนจะให้ผลลัพธ์ที่แม่นยำกว่าการใช้ความเร็วแบบซิงโครนัส สำหรับการใช้งาน VFD ให้ใช้ความเร็วความถี่พื้นฐานเป็นค่าอ้างอิง
4. การจำแนกประเภทการรับน้ำหนัก
นี่เป็นตัวกำหนดปัจจัยการใช้งาน โหลดสม่ำเสมอ: ปั๊มแรงเหวี่ยง พัดลม สายพานลำเลียงแบบเรียบ แรงกระแทกปานกลาง: สายพานลำเลียงแบบเกลียว เครื่องผสมที่มีโหลดเบา สายพานลำเลียงที่มีโหลดแปรผัน แรงกระแทกสูง: เครื่องบด เครื่องอัดอากาศ เครื่องจักรแบบลูกสูบ อุปกรณ์ทางการเกษตร การจำแนกประเภทควรสะท้อนถึงสภาวะที่เลวร้ายที่สุดที่ไดรฟ์จะประสบเป็นประจำ ไม่ใช่สภาวะทั่วไป
5. การกำหนดค่าการติดตั้ง
แบบติดตั้งบนฐาน (แผ่นฐาน, เพลาส่งกำลังแบบแข็ง), แบบติดตั้งบนหน้าแปลน (หน้าแปลนมอเตอร์ IEC B5/B14 + ตัวยึดแยกต่างหาก), เพลาแบบกลวง (เพลาส่งกำลังเลื่อนเข้าไปบนเพลาขับ — ไม่จำเป็นต้องใช้ข้อต่อ) หรือแบบแขนแรงบิด (เพลาแบบกลวง + แขนรับแรง, ไม่มีแผ่นฐาน) การกำหนดค่าจะเป็นตัวกำหนดว่าควรใช้ผลิตภัณฑ์ซีรี่ส์ใดและรุ่นใดในแคตตาล็อก — การระบุวิธีการติดตั้งก่อนเลือกแบบจะช่วยหลีกเลี่ยงการสั่งซื้อรุ่นที่ไม่ถูกต้อง
6. สภาพแวดล้อม
ช่วงอุณหภูมิแวดล้อม (ซึ่งส่งผลต่อทั้งค่าความทนทานต่อความร้อนและความหนืดของสารหล่อลื่น) ระดับความชื้นและฝุ่นละออง การสัมผัสกับสารเคมี (ปุ๋ย สารทำความสะอาด น้ำมัน) และการล้างทำความสะอาด ปัจจัยเหล่านี้เป็นตัวกำหนด: วัสดุของตัวเรือน (อะลูมิเนียมเทียบกับเหล็กหล่อ) ระดับการป้องกันน้ำและฝุ่นของซีล (IP54/IP55/IP65/IP67) ประเภทของสารหล่อลื่น (น้ำมันแร่เทียบกับน้ำมันสังเคราะห์) และการเคลือบพื้นผิวพิเศษใดๆ สภาพแวดล้อมเป็นสิ่งที่เปลี่ยนข้อมูลจำเพาะในแคตตาล็อกให้เหมาะสมกับการใช้งานจริง
7. อัตราส่วนความเร็วที่ต้องการ
คำนวณได้ดังนี้: i = n_input / n_output (เช่น 1,450 / 29 = 50:1) เลือกอัตราส่วนมาตรฐานที่ใกล้เคียงที่สุด — ค่ามาตรฐานคือ 7.5, 10, 15, 20, 25, 30, 40, 50, 60, 80 และ 100:1 หากอัตราส่วนที่คำนวณได้อยู่ระหว่างค่ามาตรฐาน ให้ปัดขึ้น (เป็นความเร็วเอาต์พุตที่ต่ำกว่า) เว้นแต่ว่าแอปพลิเคชันนั้นต้องการความเร็วสูงมาก ในกรณีนั้นให้ใช้ VFD เพื่อปรับความเร็วเอาต์พุต อัตราส่วน 20:1 ขึ้นไปจะล็อคตัวเองได้สำหรับโครงสร้างเฟืองตัวหนอนส่วนใหญ่

การเลือกค่าตัวประกอบการบริการ — พารามิเตอร์ที่มักถูกนำไปใช้อย่างไม่ถูกต้องมากที่สุด
ปัจจัยการบริการ (SF) คือตัวคูณที่ใช้กับแรงบิดเอาต์พุตที่คำนวณได้ก่อนที่จะ เกียร์ทดรอบแบบหนอน เลือกขนาดเฟรมแล้ว ค่านี้จะแก้ไขความแตกต่างระหว่างการทดสอบตามแคตตาล็อกในสภาวะคงที่กับภาระที่เปลี่ยนแปลงและกระแทกกระทั้นที่ตัวลดเกียร์ได้รับในระหว่างการใช้งาน ควรใช้ค่านี้ก่อนการเลือกเฟรม ไม่ใช่ตรวจสอบหลังจากนั้น
แรงบิดในการออกแบบ = แรงบิดที่คำนวณได้ × ปัจจัยการใช้งาน
| ประเภทของสินค้าที่รับน้ำหนัก (ตัวอย่าง) | ≤ 8 ชั่วโมง/วัน | 8 – 16 ชั่วโมง/วัน | > 16 ชั่วโมง/วัน |
|---|---|---|---|
| เครื่องแบบ — ปั๊มแรงเหวี่ยง, พัดลม, สายพานลำเลียงแบบเรียบ (สายพานอุ่น, ผลิตภัณฑ์สม่ำเสมอ) | 1.00 | 1.25 | 1.50 |
| ช็อกระดับปานกลาง — สายพานลำเลียงแบบเกลียว, เครื่องผสมแบบรับน้ำหนัก, สายพานลำเลียงแบบปรับน้ำหนักได้, การสตาร์ทสายพานลำเลียงแบบเย็น | 1.25 | 1.50 | 1.75 |
| แรงกระแทกอย่างรุนแรง — เครื่องบด, เครื่องยก (สตาร์ทขณะมีแรงกด), เครื่องจักรแบบลูกสูบ, อุปกรณ์ทางการเกษตร | 1.50 | 1.75 | 2.00 |
| แรงกระแทกรุนแรงมาก — ค้อน, เครื่องป้อนชิ้นงาน, ระบบขับเคลื่อนสำหรับการทำเหมืองที่มีระบบสตาร์ทขณะรับน้ำหนักเต็มที่ | 1.75 | 2.00 | 2.50 |
สำหรับแอปพลิเคชันที่ขับเคลื่อนด้วย VFD ซึ่งมีการควบคุมการสตาร์ทแบบนุ่มนวล (soft start) อย่างมีประสิทธิภาพ คุณอาจใช้ค่า SF ช่วงล่างสำหรับประเภทโหลดได้ เนื่องจาก VFD จะจำกัดแรงบิดกระชากขณะสตาร์ท ซึ่งค่า SF สำหรับโหลดที่มีแรงกระแทกสูงได้รับการออกแบบมาเพื่อรองรับ สำหรับการสตาร์ทโดยตรง (DOL) ให้ใช้ค่าช่วงบนเสมอ
การอ่านระเบียบข้อบังคับ: ตัวเลขและตัวอักษรหมายถึงอะไร
รหัสแบบจำลองของ เกียร์ทดรอบแบบหนอน ประกอบด้วยข้อมูลทั้งหมดที่จำเป็นในการยืนยันการกำหนดค่าก่อนสั่งซื้อ การเข้าใจระบบการกำหนดชื่อยังช่วยให้เปรียบเทียบรุ่นในแคตตาล็อก ระบุสินค้าทดแทน และตรวจจับข้อผิดพลาดในใบสั่งซื้อได้ง่ายขึ้นมาก ข้อกำหนดการตั้งชื่อเหล่านี้ใช้ได้อย่างสม่ำเสมอในทุกๆ ด้าน เกียร์ทดรอบแบบหนอน ซีรีส์นี้ผลิตโดย Korea Ever-Power
ซีรี่ส์ NMRV / RV / MRV (ตัวเรือนอะลูมิเนียม)
| องค์ประกอบ | ความหมาย | ค่าตัวอย่าง |
|---|---|---|
| เอ็น | หน้าแปลนมอเตอร์มาตรฐาน IEC | NMRV = ทางเข้าหน้าแปลน; RV = ทางเข้าเพลา |
| รถบ้าน | ตัวเรือนอะลูมิเนียมมุมฉาก | การกำหนดฐาน |
| หมายเลขขนาด | ระยะห่างระหว่างจุดศูนย์กลาง (มิลลิเมตร) | 025, 030, 040, 050, 063, 075, 090, 110, 130, 150 |
| คำต่อท้าย (ไม่บังคับ) | VS = ส่วนต่อขยายเพลาหนอน; F = หน้าแปลนเอาต์พุต | NMRV050-VS, RV063-F |
ซีรีส์ WP (ตัวเรือนเหล็กหล่อ)
| องค์ประกอบ | ความหมาย | ค่าตัวอย่าง |
|---|---|---|
| ดับเบิลยูพี | เฟืองตัวหนอน ตัวเรือนเหล็กหล่อ | การกำหนดฐาน |
| ว | เฟืองตัวหนอน (W เสมอ) | — |
| การกำหนดค่า | O = มาตรฐาน, DK = แบบมีร่องคู่, KO = แนวตั้ง, KT = แขนรับแรงบิด | WPWO, WPWDK, WPWKO |
| ขนาดกรอบ | จำนวนขนาดที่อยู่อาศัย | 40, 50, 60, 70, 80, 90, 100, 120, 135, 155, 175, 200, 250 |
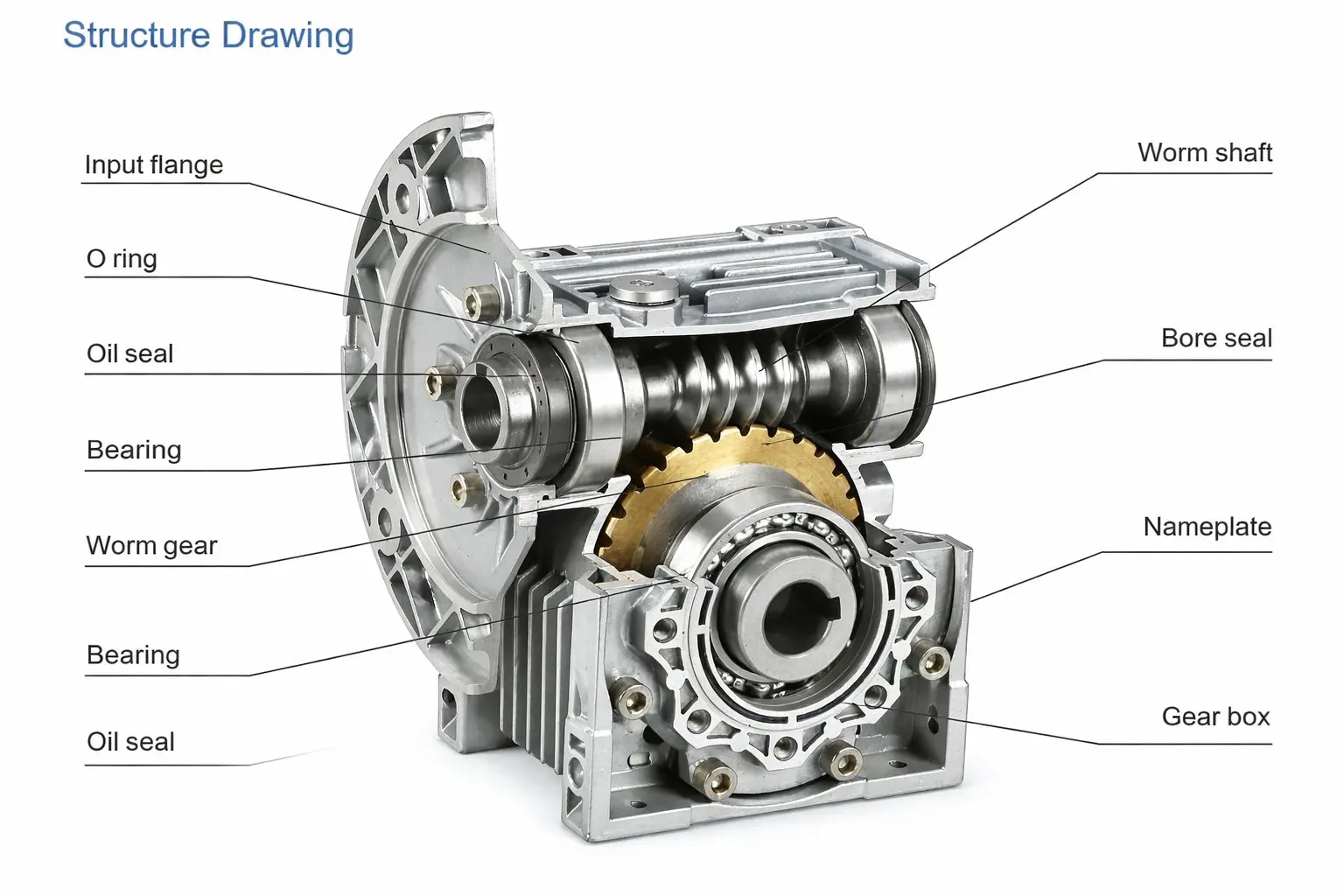
ภาพวาดโครงสร้างของชุดเกียร์ทดรอบแบบเฟืองตัวหนอน — แสดงให้เห็นถึงเพลาตัวหนอน ล้อ ตัวเรือน และเพลาส่งกำลัง ตามที่รหัสรุ่นกำหนดไว้
อัตราส่วนและรหัสหน้าแปลนมอเตอร์จะถูกเพิ่มเป็นองค์ประกอบการกำหนดแยกต่างหาก ข้อมูลจำเพาะที่สมบูรณ์มีดังนี้: NMRV050 / 40:1 / 63B14 — หมายถึงตัวเรือน NMRV อะลูมิเนียมมาตรฐาน ระยะห่างศูนย์กลาง 50 มม. อัตราส่วน 40:1 หน้าแปลนอินพุต IEC B14 ขนาด 63 มม. องค์ประกอบทั้งสามต้องตรงกับข้อกำหนดการใช้งาน ไม่ใช่แค่หมายเลขขนาดเท่านั้น
กระบวนการคัดเลือกหกขั้นตอน
โปรดทำตามขั้นตอนเหล่านี้ตามลำดับ การข้ามไปขั้นตอนที่ 6 (การตรวจสอบการติดตั้ง) โดยไม่ทำขั้นตอนที่ 4 และ 5 (การตรวจสอบอุณหภูมิ) ให้เสร็จสิ้นก่อน คือสาเหตุหลักของการเลือกที่ไม่ถูกต้องส่วนใหญ่
คำนวณ T และ n
คำนวณแรงบิดเอาต์พุตที่ต้องการ (N·m) และความเร็วรอบเอาต์พุต (rpm) จากข้อกำหนดของกระบวนการ
ใช้ปัจจัยการบริการ
จำแนกประเภทโหลด อ่านค่า SF จากตาราง แล้วคูณ: T_design = T × SF
คำนวณอัตราส่วน
i = n_input / n_output ปัดเศษให้เป็นอัตราส่วนมาตรฐานที่ใกล้เคียงที่สุด ตรวจสอบข้อกำหนดการล็อกตัวเอง (≥ 20:1)
เลือกที่อยู่อาศัยและซีรี่ส์
อะลูมิเนียม (NMRV/RV) เหมาะสำหรับงานเบาถึงปานกลางและงานที่ไวต่อน้ำหนัก เหล็กหล่อ (WP) เหมาะสำหรับงานหนัก งานที่ต้องทนอุณหภูมิแวดล้อมสูง หรือรับแรงกระแทก
ตรวจสอบกำลังความร้อน
P_heat = P_input × (1 – η). ตรวจสอบให้แน่ใจว่า P_heat < P1th (ค่าความร้อนตามแคตตาล็อกที่อุณหภูมิแวดล้อมจริง) — เป็นสิ่งที่มักถูกมองข้ามมากที่สุด เกียร์ทดรอบแบบหนอน การเลือก
ยืนยันการติดตั้งและที่อยู่ IP
ตรวจสอบภาระการยื่นของเพลาเทียบกับค่า Fr/Fa ที่กำหนด ยืนยันว่าระดับ IP ตรงกับสภาพแวดล้อม ตรวจสอบความพอดีของขนาด
ขั้นตอนที่ 5 (การตรวจสอบอุณหภูมิ) และ 6 (การยืนยันการติดตั้ง) เป็นขั้นตอนที่มักถูกละเลยในโครงการที่มีเวลาจำกัด ทั้งสองขั้นตอนสามารถดำเนินการให้เสร็จสิ้นได้ภายในเวลาไม่ถึง 10 นาที โดยใช้ข้อมูลจากแคตตาล็อก และทั้งสองขั้นตอนนี้เป็นสาเหตุของความล้มเหลวในการใช้งานจริงของตัวลดเกียร์หนอนประมาณ 60% ครั้ง ที่ต้องส่งคืนเพื่อขอรับการรับประกันหรือขอเปลี่ยนชิ้นส่วน
ข้อผิดพลาดในการคัดเลือก 8 ประการที่พบเห็นได้บ่อยในการวิเคราะห์ความล้มเหลว
ข้อผิดพลาดเหล่านี้พบได้ทั่วไปในทุกภาคอุตสาหกรรมและทุกขนาดบริษัท และแต่ละข้อผิดพลาดก็มีวิธีแก้ไขที่ง่ายดาย
โดยค่าเริ่มต้นจะกำหนดค่า SF เป็น 1.0 ทุกการใช้งานระบบขับเคลื่อนย่อมมีการเบี่ยงเบนจากภาระคงที่ในอุดมคติ การใช้ค่า SF = 1.0 ในการใช้งานอื่นนอกเหนือจากภาระคงที่สม่ำเสมอที่ได้รับการตรวจสอบแล้ว จะทำให้ค่าแรงบิดสูงสุดที่ตัวลดเกียร์จะได้รับนั้นต่ำกว่าความเป็นจริง แม้แต่สายพานลำเลียงที่เริ่มทำงานอย่างราบรื่นภายใต้ภาระ ก็ควรใช้ค่า SF = 1.25
สับสนระหว่างค่าแรงบิดเชิงกลกับค่ากำลังความร้อน เอ เกียร์ทดรอบแบบหนอน อาจจะมีพิกัดทางกลที่เพียงพอที่จะรับแรงบิดในอัตราส่วนนั้นได้ แต่ถ้าความร้อนที่เกิดขึ้นเกินความสามารถของตัวเรือนในการระบายความร้อน น้ำมันจะเสื่อมสภาพและซีลจะเสียหายก่อนที่ฟันเฟืองจะสึกหรอ ตรวจสอบตัวเลขทั้งสองแยกกัน
ใช้ความเร็วรอบมอเตอร์ซิงโครนัส (1,500 รอบต่อนาที) แทนความเร็วรอบจริง (1,450 รอบต่อนาที) ความแตกต่าง 3.3% ในการคำนวณอัตราส่วนความเร็วทำให้การเลือกอัตราส่วนผิดไปหนึ่งขั้นมาตรฐาน ซึ่งอาจดูเหมือนเล็กน้อย แต่มีความสำคัญเมื่อความเร็วเอาต์พุตที่ต้องการมีค่าเฉพาะ และอัตราส่วนที่ไม่ถูกต้องจะทำให้ 3% เร็วเกินไป
ไม่ได้ตรวจสอบแรงตามแนวแกนและแนวรัศมีของเพลาจากเฟืองที่ยื่นออกมา การติดตั้งเฟืองโซ่โดยตรงบนเพลาส่งกำลังจะสร้างแรงโหลดทั้งในแนวรัศมีและแนวแกนบนแบริ่งของเพลาส่งกำลัง หากแรงโหลดนี้เกินค่า Fr ที่ระบุไว้ในเอกสารข้อมูลจำเพาะ แบริ่งจะเสียหายก่อนกำหนด ซึ่งโดยทั่วไปแล้วจะมีลักษณะเป็นการเสียหายของแบริ่งโดยไม่ทราบสาเหตุ มากกว่าความผิดพลาดในการติดตั้ง
เลือกใช้ NMRV ที่ทำจากอลูมิเนียมสำหรับอุณหภูมิแวดล้อมสูงหรือการรับน้ำหนักมากอย่างต่อเนื่อง ตัวเรือนอะลูมิเนียม เกียร์ทดรอบแบบหนอน มีมวลความร้อนต่ำกว่าเหล็กหล่อ เมื่ออุณหภูมิแวดล้อมสูงกว่า 30°C และภาระการใช้งานเข้าใกล้กำลังรับน้ำหนักที่กำหนดอย่างต่อเนื่อง ซีรีส์ WP ที่ทำจากเหล็กหล่อ เกียร์ทดรอบแบบหนอน เป็นตัวเลือกที่น่าเชื่อถือกว่าเนื่องจากมีค่าความจุความร้อนและพื้นที่ผิวสูงกว่า
การเลือกอัตราส่วนที่ต่ำเกินไปเมื่อต้องการระบบล็อคอัตโนมัติ อัตราส่วน 15:1 หรือ 20:1 อยู่ในขอบเขตของการล็อคตัวเอง และจะไม่สามารถรักษาตำแหน่งได้อย่างน่าเชื่อถือที่อุณหภูมิใช้งาน สำหรับการใช้งานใดๆ ที่ต้องอาศัยการล็อคตัวเอง เช่น สายพานลำเลียงแบบเอียง รอก หรือกลไกการปรับแต่ง ควรระบุอัตราส่วน 30:1 หรือสูงกว่าเป็นอย่างน้อย
ยอมรับมาตรฐาน IP55 สำหรับการใช้งานที่ต้องสัมผัสกับน้ำโดยตรง มาตรฐาน IP55 ทนทานต่อแรงดันน้ำทุกทิศทาง การใช้งานกลางแจ้งในสภาพฝนตก การใช้งานทางการเกษตรระหว่างการชลประทาน และอุปกรณ์สำหรับอุตสาหกรรมอาหารระหว่างการทำความสะอาดด้วยแรงดันสูง มักจะทำให้ตัวลดแรงดันต้องเผชิญกับสภาพแวดล้อมที่เกินกว่ามาตรฐาน IP55 ควรระบุมาตรฐาน IP65 หรือ IP67 เมื่อสภาพแวดล้อมของเครื่องจักรเกี่ยวข้องกับการสัมผัสกับน้ำโดยตรงอย่างต่อเนื่อง
การกำหนดค่าความแม่นยำสูงเกินไปในแอปพลิเคชันระบบอัตโนมัติ การระบุ VRV030 Class AR (ระยะคลายตัว 0.066°) ในขณะที่คลาสมาตรฐาน (0.24°) หมายถึงความคลาดเคลื่อนในการกำหนดตำแหน่งเชิงเส้นที่สกรูนำต่ำกว่า 0.003 มม. ซึ่งดีกว่าค่าความคลาดเคลื่อนที่ยอมรับได้ของแอปพลิเคชันมากนั้น เป็นการเพิ่มต้นทุนโดยไม่เพิ่มประสิทธิภาพ ควรใช้การคำนวณระยะคลายตัวเพื่อพิจารณาคลาสที่ต้องการ ไม่ใช่ใช้สัญชาตญาณแบบอนุรักษ์นิยม
ชุดเกียร์ทดรอบแบบหนอน — คู่มืออ้างอิงฉบับย่อสำหรับการจับคู่กับงาน
ตารางนี้แสดงความสัมพันธ์ระหว่างคุณลักษณะของแต่ละซีรีส์กับประเภทการใช้งาน เพื่อใช้ในการคัดกรองเบื้องต้นอย่างรวดเร็ว การเลือกอย่างละเอียดควรยังคงใช้กระบวนการเจ็ดพารามิเตอร์ข้างต้น — ใช้ตารางนี้เพื่อระบุว่าควรเริ่มต้นด้วยซีรีส์ใด ไม่ใช่เพื่อยืนยันข้อกำหนดขั้นสุดท้าย สำหรับเอกสารข้อมูลจำเพาะฉบับสมบูรณ์ของแต่ละซีรีส์ โปรดดูที่... เกียร์หนอน หากต้องการดูข้อมูลผลิตภัณฑ์ในซีรีส์ด้านล่าง โปรดขอเอกสารข้อมูลทางเทคนิคเมื่อติดต่อ Korea Ever-Power ดูตัวเลือกเกียร์ทดรอบแบบหนอนทั้งหมดได้ที่นี่ สำหรับข้อมูลจำเพาะทั้งหมด
| ชุด | ที่อยู่อาศัย | ช่วงกำลังไฟ | ช่วงอัตราส่วน | แรงบิดสูงสุด | ไอพี | เหมาะสำหรับ |
|---|---|---|---|---|---|---|
| NMRV 025–150 | อะลูมิเนียม | 0.06–7.5 กิโลวัตต์ | 7.5:1–100:1 | ~1,500 นิวตันเมตร | IP55/65 | สายพานลำเลียงขนาดเล็กถึงปานกลาง สำหรับอาหาร บรรจุภัณฑ์ และอุปกรณ์การเกษตร (ขั้วต่อมอเตอร์ IEC) |
| RV / MRV 025–150 | อะลูมิเนียม | 0.06–7.5 กิโลวัตต์ | 7.5:1–100:1 | ~1,500 นิวตันเมตร | IP55 | เช่นเดียวกับ NMRV อินพุตเพลาแข็ง — สำหรับมอเตอร์ เครื่องยนต์ และระบบขับเคลื่อนที่เชื่อมต่อด้วยข้อต่อที่ไม่เป็นไปตามมาตรฐาน IEC |
| XRV050 | ดุมล้ออลูมิเนียม + สแตนเลส | 0.06–2.2 กิโลวัตต์ | 7.5:1–100:1 | ~450 นิวตันเมตร | IP67 | การล้างทำความสะอาด, กลางแจ้ง, โรงฆ่าสัตว์, ล้างรถ, สภาพแวดล้อมชายฝั่ง |
| วีอาร์วี030 | อะลูมิเนียม | 0.04–2.2 กิโลวัตต์ | 5:1–100:1 | ~600 นิวตันเมตร | IP54 | ระบบอัตโนมัติความแม่นยำสูง แกนเซอร์โว มอเตอร์สเต็ปเปอร์ (3 ระดับความคลาดเคลื่อน) |
| WP 40–155 (WPWO) | เหล็กหล่อ | 0.12–15 กิโลวัตต์ | 10:1–60:1 | ~5,600 นิวตันเมตร | IP55 | อุตสาหกรรมหนัก การทำเหมือง การยกของ อุณหภูมิแวดล้อมสูง การรับน้ำหนักมากอย่างต่อเนื่อง |
| WPEX (สองขั้นตอน) | เหล็กหล่อ | 0.12–15 กิโลวัตต์ | พัน:1 | ~5,000 นิวตันเมตร | IP55 | ความเร็วรอบต่ำมาก: เหมาะสำหรับงานสิ่งทอ การอบแก้ว และระบบขับเคลื่อนใบพัดทางเคมี |
วิธีการขอใบเสนอราคาและเลือกวัสดุ และรับคำตอบที่ถูกต้องรวดเร็ว
การสอบถามอย่างครบถ้วนซึ่งครอบคลุมพารามิเตอร์ทั้งเจ็ดประการสำหรับ เกียร์ทดรอบแบบหนอน จะได้รับการยืนยันคำแนะนำการคัดเลือกภายในหนึ่งวันทำการ หากคำถามไม่สมบูรณ์ จะทำให้เกิดคำถามเพิ่มเติมเพื่อขอคำชี้แจง ซึ่งจะทำให้การตอบกลับล่าช้าไป 2-5 วันทำการ การส่งข้อมูลต่อไปนี้ในข้อความเดียวจะช่วยประหยัดเวลาสำหรับทั้งสองฝ่าย:

ข้อมูลขั้นต่ำสำหรับการขอใบเสนอราคา:
• ชื่อเครื่องจักร/แอปพลิเคชัน และคำอธิบายโดยย่อ
• แรงบิดเอาต์พุตที่ต้องการ (นิวตันเมตร) — ที่สภาวะการทำงานที่กำหนด
• ความเร็วรอบเอาต์พุตที่ต้องการ (รอบต่อนาที) — หรือความเร็วของสายพาน/เพลาตามขนาดเส้นผ่านศูนย์กลางของรอก
• กำลังมอเตอร์ (กิโลวัตต์) และความเร็วรอบ (รอบต่อนาที) จากป้ายชื่อ
• เวลาทำการรายวันและประเภทของภาระงาน (สม่ำเสมอ / ปานกลาง / หนัก)
• ช่วงอุณหภูมิแวดล้อม (°C ต่ำสุด / สูงสุด)
• สภาพแวดล้อม: ภายในอาคาร / ภายนอกอาคาร / การล้างทำความสะอาด / สารเคมี / อาหาร
• รูปแบบการติดตั้งที่ต้องการ: ฐาน / หน้าแปลน / เพลาแบบกลวง / แขนรับแรงบิด
• ข้อจำกัดด้านมิติใดๆ (ขนาดโดยรวมสูงสุด ถ้าเกี่ยวข้อง)
• จำเป็นต้องมีระบบล็อคอัตโนมัติ: ใช่ / ไม่ใช่
• ปริมาณ (สำหรับการกำหนดราคา — ต้นแบบชิ้นเดียวหรือปริมาณการผลิตจำนวนมาก)
ส่งข้อมูลนี้ไปที่ เกาหลี เอเวอร์พาวเวอร์ และแนบแบบร่างการติดตั้งที่มีอยู่แล้วหากจำเป็นต้องมีการจับคู่ขนาดกับรูปแบบรูหรือเพลาที่มีอยู่ หากคุณกำลังเปลี่ยนหน่วยที่ใช้งานอยู่ ข้อมูลบนแผ่นป้ายชื่อของหน่วยเดิมจะเป็นจุดเริ่มต้นที่มีประโยชน์ — แต่ควรตรวจสอบข้อมูลจำเพาะเดิมอีกครั้งเทียบกับการใช้งานจริงในปัจจุบัน ไม่ควรสันนิษฐานว่าถูกต้องเสมอไป
คำถามที่พบบ่อย — การเลือกเกียร์ทดรอบแบบหนอน
ฉันจะคำนวณขีดจำกัดกำลังความร้อนที่อุณหภูมิแวดล้อมจริงได้อย่างไร?
ฉันสามารถใช้โมเดลเดียวสำหรับงานหลายประเภทในเครื่องเดียวกันได้หรือไม่?
ถ้าอัตราส่วนที่คำนวณได้อยู่ระหว่างค่ามาตรฐานสองค่า ฉันควรเลือกอัตราส่วนใด
เอาต์พุตแบบเพลากลวงดีกว่าเอาต์พุตแบบเพลาตันเสมอหรือไม่?
ฉันจะตรวจสอบได้อย่างไรว่าอุปกรณ์ทดแทนนั้นเข้ากันได้กับระบบติดตั้งเดิมของฉัน?
ตัวเรือนอะลูมิเนียมและตัวเรือนเหล็กหล่อที่มีขนาดเฟรมเท่ากันนั้นแตกต่างกันอย่างไร?
การใช้งานเกียร์ทดรอบแบบหนอนร่วมกับ VFD จำเป็นต้องมีข้อกำหนดพิเศษใดบ้างหรือไม่?
โดยทั่วไปแล้ว เอกสารใดบ้างที่จำเป็นสำหรับการรับรองคุณภาพผลิตภัณฑ์ OEM?
พร้อมเลือกตัวลดเกียร์หนอนของคุณแล้วหรือยัง?
ส่งพารามิเตอร์ทั้งเจ็ดจากคู่มือนี้มาให้เรา แล้วเราจะตรวจสอบความถูกต้องให้ เกียร์ทดรอบแบบหนอน จัดทำแบบจำลอง อัตราส่วน และเอกสารประกอบให้เสร็จภายในหนึ่งวันทำการ ในฐานะผู้เชี่ยวชาญ ผู้ผลิตเกียร์ทดรอบแบบหนอนเราสนับสนุนทั้งการสั่งซื้อตามแคตตาล็อกมาตรฐานและข้อกำหนดทางวิศวกรรมที่กำหนดเอง
บรรณาธิการ: Cxm

























