Schneckengetriebe vs. Stirnradgetriebe vs. Planetengetriebe
Jeder Getriebetyp hat Anwendungsbereiche, in denen er die richtige Wahl ist – und solche, in denen er eindeutig ungeeignet ist. Dieser Vergleich entfernt sich von den Spezifikationstabellen und bietet Ihnen ein praktisches, anwendungsorientiertes Rahmenwerk zur Auswahl des passenden Antriebstyps für jeden Auftrag, anstatt standardmäßig auf die gewohnte Option zurückzugreifen.
Warum die Frage „Welcher Reduzierer ist besser?“ die falsche Frage ist
Die Einkaufsteams fragen: „Auf welchen Getriebetyp sollten wir uns standardisieren?“ und die Entwicklungsteams fragen: „Welches Untersetzungsgetriebe ist technisch überlegen?“ Beide Fragestellungen führen zum falschen Ergebnis, denn bei der Auswahl des Untersetzungsgetriebes geht es im Wesentlichen darum, die Antriebseigenschaften an die Anwendungsanforderungen anzupassen – und nicht darum, Untersetzungsgetriebetypen abstrakt gegeneinander zu vergleichen.
Ein Harmonic Drive erreicht nahezu spielfreie Kraftübertragung. Ein Schneckengetriebe bietet mechanische Selbsthemmung. Ein Planetengetriebe liefert hohe Leistungsdichte in kompakter Bauform. Diese Getriebe stehen nicht im Widerspruch zueinander – sie lösen unterschiedliche technische Probleme. Das „beste“ Getriebe für ein Solarmodul-Nachführsystem ist mit ziemlicher Sicherheit nicht das beste Getriebe für eine chirurgische Roboterachse, und dieses wiederum ist mit ziemlicher Sicherheit nicht das beste Getriebe für eine Förderanlage im Bergbau.
Dieser Artikel bietet einen Entscheidungsrahmen, um diese Eigenschaften spezifischen Anwendungen zuzuordnen – einschließlich der ehrlichen Berücksichtigung der jeweiligen Einschränkungen und Stärken. Am Ende sollten Sie in der Lage sein, jede Antriebsanwendung anhand der relevanten Kriterien zu bewerten und in den meisten Standardfällen ohne die Unterstützung von Spezialisten eine technisch fundierte Auswahl des Untersetzungsgetriebes zu treffen.
Vier Haupttypen von Reduziergetrieben: Wichtigste Merkmale auf einen Blick
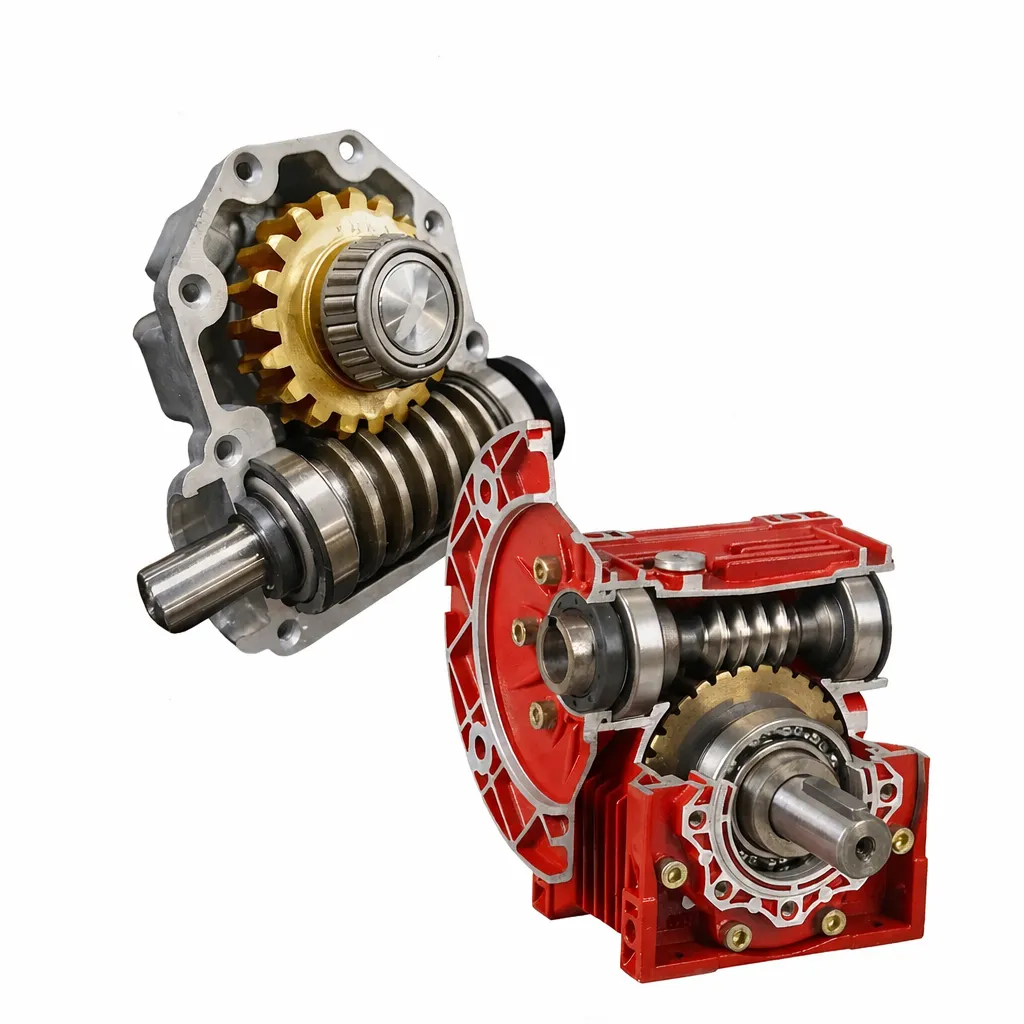
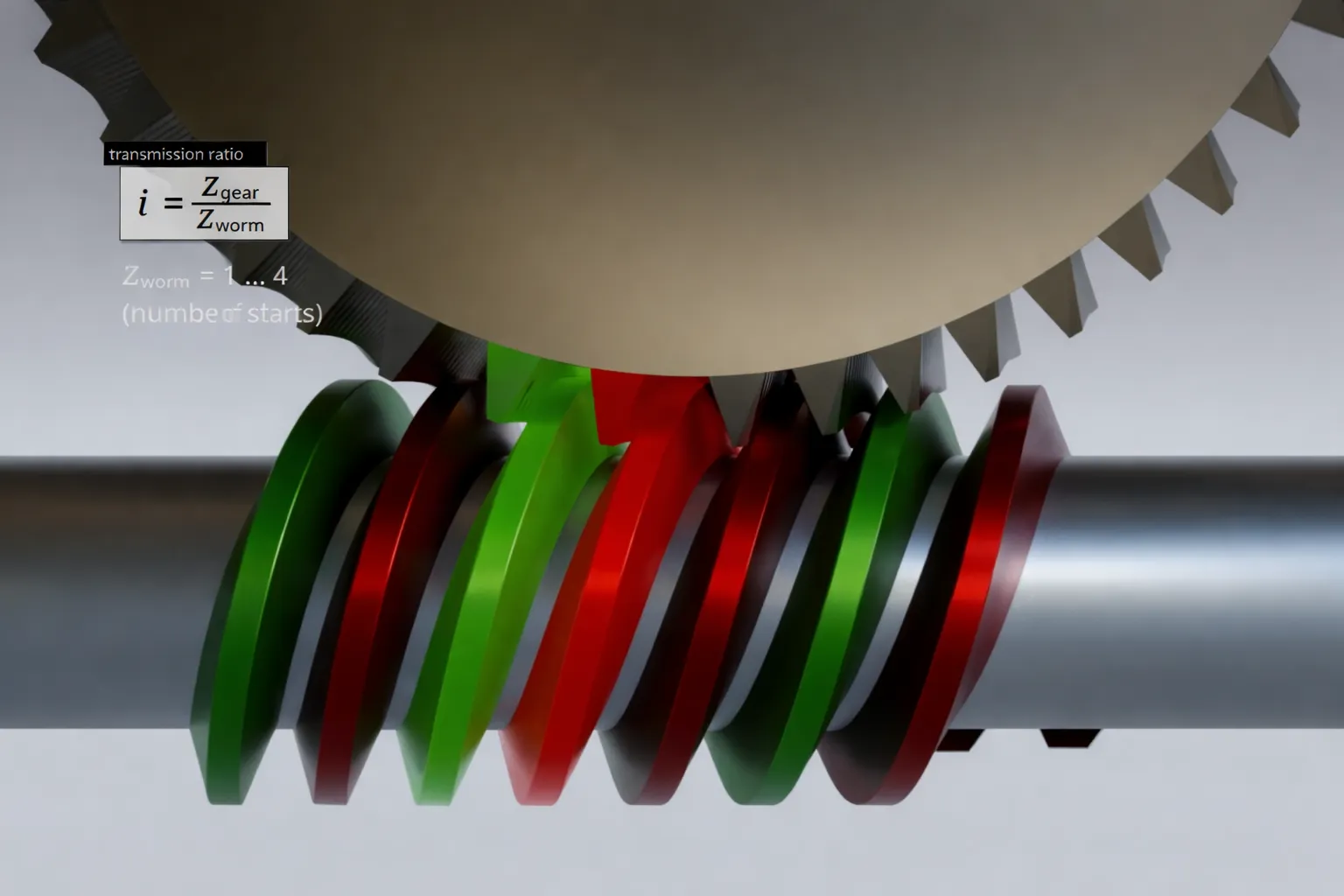
Schneckengetriebe
Die Schnecke (eine Gewindewelle, die einer Schraube ähnelt) kämmt mit einem bronzenen Schneckenrad im 90-Grad-Winkel. Der Gleitkontakt im Eingriff bewirkt die Schneckengetriebe Seine besonderen Merkmale: rechtwinkliger Abtrieb als Standard, hohes einstufiges Untersetzungsverhältnis (bis zu 100:1) und Selbsthemmung bei hohen Übersetzungen. Der Gleitkontakt bedingt jedoch einen Kompromiss hinsichtlich des Wirkungsgrades – die Reibung im Eingriff erzeugt Wärme, die den Wirkungsgrad im Vergleich zu Wälzkontaktgetrieben verringert.
Einzigartige Immobilie: Selbsthemmend – die Abtriebswelle kann den Antriebsmotor nicht rückwärts antreiben, wenn der Motor abgeschaltet ist (bei Übersetzungsverhältnissen ≥ 20:1).
Stirnradgetriebe
Schrägverzahnte Zahnräder haben Zähne, die schräg zur Zahnradachse verlaufen. Dadurch entsteht ein Wälzkontakt, bei dem mehrere Zähne gleichzeitig im Eingriff sind. Dies sorgt für eine gleichmäßige Kraftübertragung, geringe Geräuschentwicklung und hohen Wirkungsgrad. Einstufige Schrägverzahnungsgetriebe sind bauartbedingt parallel (Ein- und Ausgangswelle verlaufen parallel). Für einen rechtwinkligen Abtrieb wird eine Kegel- oder Hypoidverzahnung am Abtrieb benötigt – dies ist die in Industriemotoren übliche Schrägverzahnungs-Kegel- oder Schrägverzahnungs-Schnecken-Konfiguration.
Einzigartige Immobilie: Höchste Effizienz (92–98%) – die eindeutige Wahl, wenn die Energiekosten im Dauerbetrieb ein entscheidender Faktor für die Konstruktion sind.
Planetengetriebe
Mehrere Planetenräder umkreisen ein zentrales Sonnenrad innerhalb eines Hohlrads. Die Last verteilt sich gleichzeitig auf mehrere Planetenräder, wodurch Planetengetriebe eine außergewöhnliche Drehmomentdichte erreichen – hohes Drehmoment bei kompakter Bauweise. Das Ausgangsdrehmoment entspricht dem Eingangsdrehmoment. Übersetzungsverhältnisse von 3:1 bis 100:1 sind möglich, und mehrere Stufen erhöhen das Übersetzungsverhältnis zusätzlich. Der Wirkungsgrad ist mit 90–971 TP3T hoch.
Einzigartige Immobilie: Höchstes Leistungs-zu-Größe-Verhältnis – wenn der verfügbare Platz in der Gebäudehülle die primäre Einschränkung darstellt und das Budget dies zulässt.
Kegelradgetriebe
Kegelräder übertragen die Bewegung zwischen sich schneidenden Wellen – typischerweise im 90°-Winkel – und eignen sich daher ideal für rechtwinklige Getriebe. Spiralkegelräder (die gängigste industrielle Ausführung) kombinieren die rechtwinklige Übertragung mit Wälzkontakt und erreichen einen Wirkungsgrad von 92–971 TP3T. Die Übersetzungsverhältnisse pro Stufe sind auf etwa 1:1 bis 5:1 begrenzt, sodass für hohe Untersetzungen mehrere Stufen erforderlich sind.
Wichtigste Einschränkung: Keine Selbsthemmung – für jede Lasthalteanwendung ist unabhängig vom Übersetzungsverhältnis eine separate mechanische Bremse erforderlich.

Sechs Leistungsdimensionen: Vergleich im direkten Vergleich
Die folgenden Daten stellen typische Werte für Standard-Industriekonfigurationen dar – nicht die Extremwerte, die durch kundenspezifische Entwicklungen erreicht werden können. Nutzen Sie diese Bereiche für eine erste Einschätzung; die endgültige Spezifikation entnehmen Sie bitte dem jeweiligen Produktdatenblatt.
| Dimension | Schneckengetriebe | Spiral | Planetarisch | Fase |
|---|---|---|---|---|
| Effizienzbereich | 60 – 90% | 92 – 98% | 90 – 97% | 92 – 97% |
| Einstufiges Verhältnis | 5:1 – 100:1 | 3:1 – 25:1 | 3:1 – 100:1 | 1:1 – 5:1 |
| Selbstverriegelnd | Ja (≥ 20:1) | NEIN | NEIN | NEIN |
| rechtwinkliger Ausgang | Standard | Benötigt Fasenstufe | Benötigt Fasenstufe | Standard |
| Geräuschentwicklung bei niedrigen Drehzahlen | Niedrig – Mittel | Niedrig | Medium | Mittel – Hoch |
| Relativer Stückpreis (gleiches Übersetzungsverhältnis/Drehmoment) | Niedrig – Mittel | Medium | Hoch | Mittel – Hoch |
Die Effizienzzeile lesen: der Bereich 60–90% für ein Schneckengetriebe Der Wirkungsgradunterschied ist größer als er scheint, da er mit steigendem Übersetzungsverhältnis stark abfällt. Bei einem Übersetzungsverhältnis von 10:1 kann ein Schneckengetriebe einen Wirkungsgrad von 85–901 TP³T erreichen. Bei 80:1 liegt der Wirkungsgrad bei 60–701 TP³T. Bei niedrigeren Übersetzungsverhältnissen sind die Wirkungsgrade von Schnecken- und Spiralgetrieben ähnlicher; der größte Unterschied besteht bei hohen Übersetzungsverhältnissen. Hier machen die rechtwinklige Anordnung und die Selbsthemmung des Schneckengetriebes es trotz des Wirkungsgradunterschieds wettbewerbsfähig.
Anwendungsentscheidungsmatrix – Zuordnung von Antriebsbedingungen zu Getriebetyp
Diese Matrix ordnet zehn gängige Anwendungsbedingungen dem jeweils bevorzugten Reducer-Typ zu und erläutert die Gründe für jede Auswahl. Nutzen Sie sie als Ausgangspunkt – Anwendungen, die mehrere Bedingungen gleichzeitig erfüllen, sollten die Auswahl anhand jeder zutreffenden Zeile überprüfen.
| Anwendungsbedingung | Erste Wahl | Zweite Wahl | Auswahllogik |
|---|---|---|---|
| Ausgangsdrehzahl < 30 U/min vom Standardmotor (einstufig) | Wurm | Planetarisch (2-stufig) | Die Schneckenpumpe erreicht ein Übersetzungsverhältnis von 50:1 bis 100:1 in einer Stufe; die Wendelpumpe benötigt mindestens drei Stufen für dasselbe Verhältnis. |
| Die Last muss ihre Position halten, wenn der Motor ausgeschaltet ist. | Wurm (≥ 30:1) | Jede externe Bremse | Nur der Wurm Getriebeuntersetzung bietet Selbstverriegelung ohne separate motorbetriebene Bremsvorrichtung |
| Rechtwinkliger Ausgang, kostensensibel | Wurm | Spiralenfase | Die Schneckenform bietet standardmäßig einen rechten Winkel zum niedrigsten Preis; die Fase erhöht die Effizienz bei höheren Kosten. |
| Antriebseffizienz > 90% erforderlich (Energiekosten kritisch) | Spiral | Planetarisch | Weder Schnecken- noch Kegelradgetriebe erreichen durchgängig einen Wert von >90% über alle Übersetzungsverhältnisse hinweg; Spiralgetriebe hingegen schon. |
| Hochfrequenter bidirektionaler Betrieb (>100 Starts/Std.) | Spiral | Planetarisch | Thermische Zyklen bei hohen Drehzahlumkehrfrequenzen verringern die Lebensdauer des Schneckengetriebes. |
| Maximales Drehmoment im minimalen Bauraum | Planetarisch | Wurm (in hohem Verhältnis) | Die Lastverteilung des Planetengetriebes auf mehrere Planeten sorgt für eine maximale Drehmomentdichte pro Kilogramm Gehäuse. |
| Präzisionspositionierung ≤ 0,1° Wiederholgenauigkeit | Planetary oder VRV030 AR | Harmonic Drive | Standardmäßiges Schneckengetriebespiel (0,24°) unzureichend; VRV030 Klasse AR (0,066°) oder Planetengetriebe erforderlich |
| Geeignet für Außenbereiche, nasse oder abspritzbare Umgebungen (IP65+) | Wurm (IP65/67) | Planetengetriebe aus Edelstahl | Schneckengetriebe sind in Schutzart IP67 (Serie XRV050) erhältlich; vergleichbare Planetengetriebe mit Schutzart IP sind deutlich teurer. |
| Sehr niedrige Ausgangsdrehzahl (< 5 U/min) des Standardmotors | Wurm (zweistufig) | Mehrstufige Wendel | Die zweistufige Schnecke von WPEX erreicht ein Übersetzungsverhältnis von Tausenden:1 in einem einzigen Gehäuse – ohne Zwischenkupplung. |
| Hohe Stoßbelastung bei hohem Ausgangsdrehmoment (> 5.000 N·m) | Spiral- oder WP-Wurm | Planetarisch (übergroß) | Gusseisen WP-Serie Schneckengetriebe Dank seiner Gehäusesteifigkeit verträgt es Stoßbelastungen gut; im Vergleich dazu ist ein Schrägverzahnungs-Kegelverzahnungs-Getriebe bei gleichem Drehmoment für effizienzkritische Anwendungen geeignet. |

Drei häufige Missverständnisse bei der Auswahl des Reduziergetriebetyps
Diese drei Aussagen tauchen häufig in Beschaffungsgesprächen und technischen Diskussionen auf. Jede enthält eine Teilwahrheit, die irreführend wird, wenn sie ohne den vollständigen Kontext angewendet wird.

„Schneckengetriebe sind ineffizient – sie sollten durch Stirnradgetriebe ersetzt werden.“
Die Teilwahrheit: Ein Schneckengetriebe ist bei gleichem Übersetzungsverhältnis weniger effizient als ein Stirnradgetriebe. Bei einem Übersetzungsverhältnis von 80:1 erreicht ein Schneckengetriebe einen Wirkungsgrad von 60–701 TP³T; ein Stirnradgetriebe mit demselben Übersetzungsverhältnis läge über mehrere Stufen bei 87–921 TP³T.
Was fehlt: Der Schrägverzahnungsantrieb mit einem Übersetzungsverhältnis von 80:1 benötigt drei oder mehr Verzahnungsstufen, eine Zwischenwellenkupplung und mindestens 40% mehr Einbaulänge als der Schneckenantrieb. Bei rechtwinkligem Abtrieb kommt eine Kegelverzahnungsstufe hinzu. Das Gesamtsystem inklusive Motorauslegung, Kupplung und Montagekonstruktion gleicht die Energiekostendifferenz über einen vollen 10-jährigen Lebenszyklus in der Regel weitgehend aus. Der Schneckenantrieb ist zwar tatsächlich weniger effizient, der Effizienzunterschied führt jedoch nicht automatisch zu höheren Kosten, die die Alternative rechtfertigen würden.
Die korrekte Rahmung: Wenn die kontinuierlichen Energiekosten das dominierende Auswahlkriterium darstellen und der Effizienzunterschied die tatsächlichen Betriebskosten im großen Maßstab widerspiegelt, ist die Wendelrohrvariante den Aufpreis wert. Für die meisten Anwendungen mit leichter bis mittlerer Belastung ist der Effizienzunterschied zwar ein relevanter, aber geringfügiger Faktor.
„Planetengetriebe sind präziser und daher für die Automatisierung immer besser geeignet.“
Die Teilwahrheit: Standard-Planetengetriebe erreichen ein geringeres Zahnflankenspiel als Standard-Schneckengetriebe – typischerweise 3–8 Bogenminuten gegenüber 14–15 Bogenminuten (0,24°) bei Standard-Schneckengetrieben.
Was fehlt: Die meisten Automatisierungsanwendungen weisen Positioniertoleranzen auf, die weit unter den Möglichkeiten eines Standard-Schneckengetriebes liegen. Ein Positioniertisch mit Leitspindel und einer Toleranz von ±0,05 mm weist bei Standard-Steigung lediglich einen linearen Fehler von 0,003 mm aufgrund des Spiel eines Standard-Schneckengetriebes auf – vernachlässigbar. Planetengetriebe sind ebenfalls linear. Bei einer rechtwinkligen Antriebsanwendung würde der zusätzliche Einsatz einer Kegelradstufe zur Erzielung eines rechtwinkligen Abtriebs die Kosten und die Komplexität erhöhen und die scheinbaren Vorteile des Planetengetriebes für diese spezifische Einbaugeometrie zunichtemachen.
Die korrekte Rahmung: Ermitteln Sie mithilfe der Spielberechnung, was die Anwendung tatsächlich benötigt. Ergibt die Berechnung, dass das Standard-Schneckenspiel zu einem Positionierfehler innerhalb der Toleranz führt, verursacht der Einsatz eines Planetengetriebes zusätzliche Kosten ohne Leistungssteigerung. Bei geringen Toleranzen empfiehlt sich hingegen ein Präzisions-Schneckengetriebe (VRV030 Klasse A oder AR) oder ein Planetengetriebe.
„Helikopterantriebe ersetzen Schneckenantriebe – das ist ein Branchentrend“
Die Teilwahrheit: Kombinationsgetriebe aus Kegelstirn- und Schneckengetrieben haben sich in Anwendungsbereichen, in denen die vorherige Generation reine Schneckengetriebe einsetzte, einen bedeutenden Marktanteil erobert. Bei anspruchsvollen industriellen Förderanlagen und Mischern haben die Effizienz- und Geräuschvorteile von Kegelstirngetrieben die wirtschaftliche Umrüstung im großen Maßstab attraktiv gemacht.
Was fehlt: Die selbstverriegelnde Eigenschaft des Wurms Getriebeuntersetzung Es gibt kein gleichwertiges Schraubgetriebe mit demselben Übersetzungsverhältnis ohne externe Bremse. Für die große Anwendungsgruppe, die auf Selbsthemmung angewiesen ist – wie z. B. Schrägförderer, Hebezeuge und Verstellmechanismen – werden Schneckengetriebe nicht ersetzt. Sie sind die mechanisch korrekte Lösung. Jede Behauptung, ein Schraubgetriebe könne ein Schneckengetriebe in einer Lasthalteanwendung ersetzen, erfordert die Klärung, wo die Haltefunktion übernommen wird. Dies geschieht entweder durch eine elektromagnetische Bremse (zusätzliche Kosten und Wartungsaufwand) oder durch eine Anpassung der Anwendung.
Die korrekte Rahmung: Der Markt entfernt sich nicht von Schneckengetrieben – er sortiert die Anwendungen präziser, wobei einige Anwendungen mit hoher Beanspruchung im Dauerbetrieb auf Spiralgetriebe umsteigen und selbsthemmende Anwendungen weiterhin mit Schneckengetrieben betrieben werden.
Über den Kaufpreis hinaus: Gesamtbetriebskosten über 10 Jahre
Der Anschaffungspreis des Getriebes beträgt typischerweise 3–81 TP3T der Gesamtkosten des Antriebssystems über eine Lebensdauer von 10 Jahren, wenn der Energieverbrauch berücksichtigt wird. Der Vergleich ändert sich erheblich, wenn man alle Kostenfaktoren einbezieht:

Berechnung der Gesamtbetriebskosten über 10 Jahre: 2,2 kW Antrieb, 8 Std./Tag, 250 Tage/Jahr
Stromkostenreferenz: 130 KRW/kWh (ungefährer koreanischer Industriestrompreis). Anwendung: Winkelantrieb, Übersetzungsverhältnis 80:1 erforderlich, keine Selbsthemmung notwendig, moderate Umgebungsbedingungen.
| Kostenelement | Schneckengetriebe | Spiral-Bevel | Anmerkungen |
|---|---|---|---|
| Stückkaufpreis | ~$200 | ~$420 | Schrägverzahnung mit rechtwinkligem Abtrieb, äquivalentes Drehmoment |
| Wirkungsgrad bei 80:1 | ~72% | ~91% | kombinierte Effizienz der mehrstufigen Spiral- und Kegelstufe |
| Jährlicher Energieeintrag | 6.111 kWh | 4.835 kWh | P_Eingangsleistung = 2,2 kW / Wirkungsgrad × 8 h × 250 Tage |
| Jährliche Energiekosten | ~$611 | ~$484 | Bei $0,10/kWh |
| Energiekosten über 10 Jahre | $6,110 | $4,840 | Helical spart 1.270 TP4T über 10 Jahre |
| Ölwechsel + Wartung (10 Jahre) | ~$180 | ~$280 | Bei Helical-Getrieben muss mehr Öl gewechselt werden (mehrere Stufen). |
| Gesamtkosten über 10 Jahre | ~$6,490 | ~$5,540 | Helical-Vorteil: $950 über 10 Jahre |
| Hinzurechnen, falls Selbsthemmung erforderlich: Die Wendel benötigt eine elektromagnetische Bremse (ca. $180 Einheit + $120 Wartung) = $300 zusätzlich zu den Gesamtbetriebskosten der Wendel → Differenz verringert sich auf $650 bzw. 10% der Gesamtbetriebskosten |
Der Kegelradantrieb bietet in diesem Beispiel über 10 Jahre hinweg die niedrigeren Gesamtbetriebskosten (TCO) – das entspricht etwa 151.030 Gesamtlebenszykluskosten. Dies ist ein deutlicher Vorteil. Er fällt jedoch deutlich geringer aus, als der Vergleich der Anschaffungskosten (2,1-fach höherer Stückpreis) vermuten lässt. Ob dieser Vorteil die höheren Investitionsausgaben rechtfertigt, hängt von der Kostenrechnung des Projekts (Investitions- vs. Betriebskosten) ab.
Bei rechtwinkligen Anwendungen, bei denen eine Selbsthemmung erforderlich ist – eine häufige Kombination in der Praxis –, benötigt die Schrägkegel-Option die elektromagnetische Bremse, wodurch der Spalt weiter verringert wird. Bei Anwendungen mit geringerer Betriebsdauer pro Tag sinkt die Energieeinsparung proportional. Schneckengetriebe Es ist in den meisten Anwendungsfällen hinsichtlich der Gesamtbetriebskosten wettbewerbsfähig, nicht nur in den offensichtlich kostengünstigen Fällen. Die konkreten Zahlen hängen vollständig vom Betriebszyklus, den Energiekosten und davon ab, ob die Selbsthemmungseigenschaft benötigt wird.
Wie Sie Ihre Auswahl des Reduzierstücks einem Konstruktionsingenieur präsentieren
Beschaffungsingenieure stehen manchmal vor der Notwendigkeit, eine Schneckengetriebe Die Auswahl geht an einen Konstruktionsingenieur, der standardmäßig teurere Alternativen bevorzugt. Der folgende Rahmen stellt die Diskussion auf technische und nicht auf Präferenzgründe:
Drei-Punkte-Auswahlbegründungsrahmen:
1. Definieren Sie die Anforderung, nicht die Präferenz. Geben Sie die tatsächliche Positioniertoleranz, die erforderliche Ausgangsdrehzahl und an, ob eine Selbsthemmung funktional notwendig ist. „Die Anwendung erfordert eine Positioniergenauigkeit von ±2 mm, eine Ausgangsdrehzahl von 18 U/min und eine Lasthaltung ohne Bremse.“ Dadurch wird die tatsächliche technische Anforderung von einer möglichen Notwendigkeit für einen bestimmten Getriebetyp getrennt.
2. Zeigen Sie die Berechnungen, nicht die Schlussfolgerungen. „Ein Standard-Schneckengetriebe mit diesem Übersetzungsverhältnis erzeugt einen Positionierfehler von 0,024 mm an der Antriebsspindel – die Toleranz beträgt ±2 mm. Die Selbsthemmung bei einem Übersetzungsverhältnis von 40:1 hält die Position beim Motorstillstand, wodurch eine separate Haltebremse überflüssig wird.“ Zahlenbasierte Begründungen lassen sich deutlich schwerer allein aufgrund von Präferenzen widerlegen.
3. Präsentieren Sie den TCO-Vergleich, nicht nur den Stückpreis. Zeigen Sie die 10-Jahres-Berechnung auf – Stückkosten, Energieaufwand, Wartung und alle zusätzlichen Komponenten, die die Alternative benötigt (Bremse, Adapter, zusätzliche Stufe). Dadurch wird aus einer Diskussion über ein „günstigeres Getriebe“ eine Betrachtung der Lebenszykluskosten, was die korrekte technische Herangehensweise darstellt.
Bei Anwendungen, bei denen die Daten tatsächlich einen anderen Getriebetyp nahelegen – etwa wenn Effizienz entscheidend ist, das Spiel gering oder die Leistungsdichte der limitierende Faktor –, weist dasselbe System korrekt auf die Alternative hin. Ziel ist es stets, den Antrieb an die Anwendung anzupassen, nicht eine bestimmte Präferenz zu verteidigen. Als Spezialist Hersteller von SchneckengetriebenWir unterstützen unsere Kunden mit Auswahldaten und Berechnungen für den Vergleich, auch in Fällen, in denen ein alternativer Antriebstyp besser für eine bestimmte Anwendung geeignet ist. Entdecken Sie unser Sortiment an Schneckengetrieben. für Spezifikationen und Maßangaben.
Häufig gestellte Fragen – Vergleich der Reduziergetriebetypen
Kann ein Stirnradgetriebe ein Schneckengetriebe in einer Schrägförderanlage vollständig ersetzen?
Bei welcher Dauerleistung wird der Wirkungsgradunterschied zwischen Schnecken- und Schraubenverdichtern signifikant?
Sind Kegelradgetriebe eine bessere Option für rechtwinklige Getriebe als Schneckengetriebe?
Warum verwenden Lebensmittelverarbeitungsbetriebe trotz ihres geringeren Wirkungsgrades häufig Schneckengetriebe?
Welcher Übersetzungsbereich ist der optimale Bereich für Schneckengetriebe im Vergleich zur Konkurrenz?
Lässt sich ein Schneckengetriebe und ein Stirnradgetriebe in einem einzigen Antrieb kombinieren?
Benötigen Sie eine Empfehlung für den passenden Reduzierstücktyp für Ihre spezifische Anwendung?
Teilen Sie uns bitte die Anforderungen Ihrer Anwendung hinsichtlich Ausgangsdrehzahl, Drehmoment, Wirkungsgrad und der benötigten Abtriebsart (selbsthemmend oder rechtwinklig) mit. Wir ermitteln, welcher Getriebetyp – auch in Fällen, in denen eine Stirnrad- oder Kombinationslösung besser geeignet ist – für Ihre Anwendung am besten geeignet ist, und stellen Ihnen Vergleichsdaten zur Verfügung, um Ihre Auswahlentscheidung zu unterstützen.
Herausgeber: Cxm

























