Reducer Roda Gigi Cacing vs Heliks vs Planetary
Setiap jenis reduktor memiliki aplikasi di mana ia merupakan pilihan yang tepat — dan aplikasi di mana ia jelas merupakan pilihan yang salah. Perbandingan ini menelaah tabel spesifikasi dan memberi Anda kerangka kerja praktis berbasis aplikasi untuk memilih jenis drive yang tepat untuk setiap pekerjaan, daripada secara otomatis memilih opsi yang paling familiar.
Mengapa “Reducer Mana yang Lebih Baik?” Adalah Pertanyaan yang Salah?
Tim pengadaan bertanya “jenis gearbox mana yang harus kita standarisasi?” dan tim teknik bertanya “reduksi mana yang secara teknis lebih unggul?” Kedua pertanyaan tersebut mengarah pada hasil yang salah, karena pemilihan reduksi pada dasarnya adalah tentang mencocokkan karakteristik penggerak dengan persyaratan aplikasi — bukan memeringkat jenis reduksi satu sama lain secara abstrak.
Penggerak harmonik mencapai hampir nol celah (backlash). Reducer roda gigi cacing memberikan penguncian mekanis otomatis. Reducer planet memberikan kepadatan daya tinggi dalam wadah inline yang kompak. Ini bukanlah kemampuan yang saling bersaing — mereka menangani masalah teknik yang berbeda. Reducer "terbaik" untuk sistem pelacakan panel surya hampir pasti bukan reducer terbaik untuk sumbu robot bedah, yang hampir pasti bukan reducer terbaik untuk alat pengangkat tambang.
Artikel ini menyediakan kerangka kerja pengambilan keputusan untuk mencocokkan karakteristik ini dengan aplikasi spesifik — termasuk pengakuan jujur atas keterbatasan setiap jenis, bukan hanya kekuatannya. Pada akhirnya, Anda seharusnya dapat menilai aplikasi penggerak apa pun berdasarkan kriteria yang relevan dan mencapai pemilihan reduktor yang dapat dipertanggungjawabkan secara teknis tanpa dukungan spesialis untuk sebagian besar kasus standar.
Empat Tipe Reducer Utama: Karakteristik Utama Sekilas
Reducer Roda Gigi Cacing
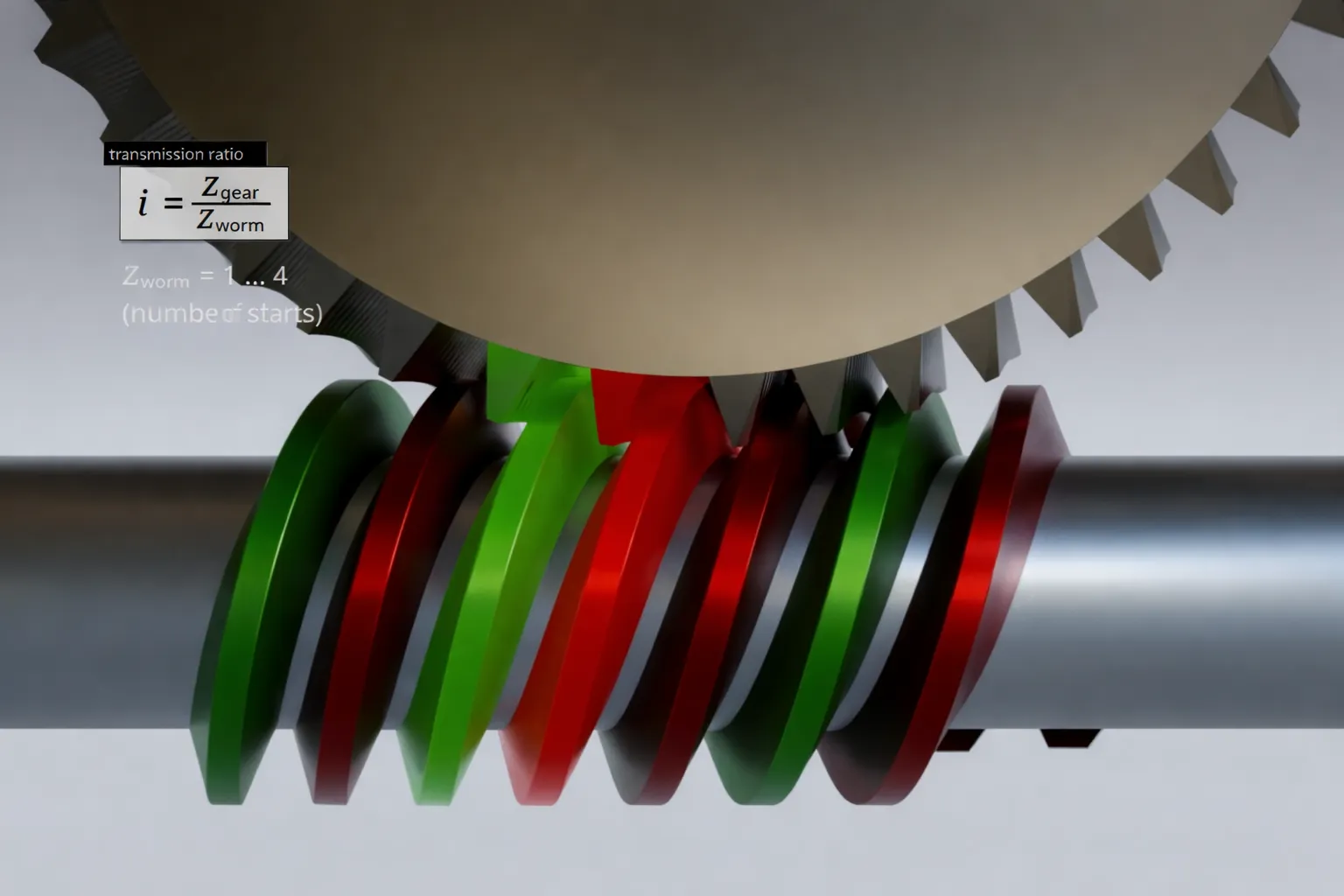
Cacing (poros berulir yang menyerupai sekrup) berpasangan dengan roda gigi cacing perunggu pada sudut 90 derajat. Kontak geser pada pasangan tersebut memberikan reduktor roda gigi cacing Ciri khasnya meliputi: keluaran sudut siku-siku sebagai standar, rasio reduksi satu tahap yang tinggi (hingga 100:1), dan penguncian otomatis pada rasio tinggi. Kontak geser juga menciptakan kompromi efisiensi — gesekan pada jalinan menghasilkan panas yang mengurangi efisiensi dibandingkan dengan jenis roda gigi kontak bergulir.
Properti unik: Penguncian otomatis — poros keluaran tidak dapat menggerakkan balik input saat motor mati (pada rasio ≥ 20:1).
Reducer Gigi Heliks
Roda gigi heliks memiliki gigi yang dipotong pada sudut tertentu terhadap sumbu roda gigi. Hal ini menciptakan kontak bergulir dengan banyak gigi yang terhubung secara bersamaan, memberikan transmisi yang halus, kebisingan rendah, dan efisiensi tinggi. Pereduksi heliks satu tahap secara inheren sejajar (poros input dan output paralel). Output sudut siku-siku membutuhkan tahap roda gigi bevel atau hypoid yang ditambahkan pada output — ini adalah konfigurasi heliks-bevel atau heliks-worm yang umum pada motor industri.
Properti unik: Efisiensi tertinggi (92–98%) — pilihan yang tepat ketika biaya energi dibandingkan dengan pengoperasian berkelanjutan menjadi pertimbangan utama dalam desain.
Pengurang Planet
Beberapa roda gigi planet mengorbit roda gigi matahari pusat di dalam roda gigi cincin. Beban didistribusikan ke beberapa roda gigi planet secara bersamaan, memberikan reduktor planet kepadatan torsi yang luar biasa — keluaran torsi tinggi dari rumah yang kompak. Keluaran sejajar dengan masukan. Rasio 3:1 hingga 100:1 dapat dicapai, dan beberapa tahap melipatgandakan rasio lebih lanjut. Efisiensi tinggi pada 90–97%.
Properti unik: Rasio daya terhadap ukuran tertinggi — bila ruang yang tersedia merupakan kendala utama dan anggaran memungkinkan.
Reducer Gigi Bevel
Roda gigi bevel mentransmisikan gerakan antara poros yang berpotongan — biasanya pada sudut 90 derajat, menjadikannya pilihan sudut siku-siku yang alami. Roda gigi bevel spiral (jenis industri yang paling umum) menggabungkan kemampuan sudut siku-siku dengan kontak bergulir, memberikan efisiensi 92–97%. Rasio kecepatan per tahap terbatas sekitar 1:1 hingga 5:1, sehingga membutuhkan beberapa tahap untuk reduksi tinggi.
Keterbatasan utama: Tidak ada penguncian otomatis — untuk aplikasi penahan beban apa pun, rem mekanis terpisah diperlukan terlepas dari rasio gigi.

Enam Dimensi Kinerja: Perbandingan Berdampingan
Data di bawah ini mewakili nilai tipikal untuk konfigurasi industri standar — bukan nilai ekstrem yang dapat dicapai dengan rekayasa khusus. Gunakan rentang ini untuk penyaringan awal; konfirmasikan dengan lembar data produk spesifik untuk spesifikasi akhir.
| Dimensi | Reducer Roda Gigi Cacing | Spiral | Planet | Memiringkan |
|---|---|---|---|---|
| Rentang efisiensi | 60 – 90% | 92 – 98% | 90 – 97% | 92 – 97% |
| Rasio satu tahap | 5:1 – 100:1 | 3:1 – 25:1 | 3:1 – 100:1 | 1:1 – 5:1 |
| Pengunci otomatis | Ya (≥ 20:1) | TIDAK | TIDAK | TIDAK |
| Keluaran siku-siku | Standar | Membutuhkan tahap kemiringan | Membutuhkan tahap kemiringan | Standar |
| Kebisingan pada putaran mesin rendah | Rendah – Sedang | Rendah | Sedang | Sedang – Tinggi |
| Harga satuan relatif (rasio/torsi yang sama) | Rendah – Sedang | Sedang | Tinggi | Sedang – Tinggi |
Membaca baris efisiensi: rentang 60–90% untuk sebuah reduktor roda gigi cacing Perbedaan efisiensi lebih besar dari yang terlihat karena efisiensi menurun tajam seiring dengan peningkatan rasio. Pada rasio 10:1, penggerak cacing mungkin memiliki efisiensi 85–90%. Pada rasio 80:1, efisiensi mungkin 60–70%. Rasio yang lebih rendah adalah tempat efisiensi penggerak cacing dan heliks lebih dekat; kesenjangan besar terjadi pada rasio tinggi, yang juga merupakan tempat tata letak sudut siku-siku dan sifat penguncian otomatis penggerak cacing membuatnya kompetitif meskipun ada kesenjangan efisiensi.
Matriks Keputusan Aplikasi — Mencocokkan Kondisi Penggerak dengan Jenis Reducer
Matriks ini memetakan sepuluh kondisi aplikasi umum ke tipe pereduksi pilihan pertama dan pilihan kedua, dengan alasan spesifik untuk setiap pilihan. Gunakan ini sebagai kerangka kerja awal — aplikasi yang memenuhi beberapa kondisi secara bersamaan harus memeriksa pilihan terhadap setiap baris yang berlaku.
| Kondisi Aplikasi | Pilihan Pertama | Pilihan Kedua | Logika Seleksi |
|---|---|---|---|
| Kecepatan keluaran < 30 rpm dari motor standar (satu tahap) | Cacing | Planet (2 tahap) | Bentuk cacing (worm) mencapai rasio 50:1 – 100:1 dalam satu tahap; bentuk heliks (helical) membutuhkan 3 tahap atau lebih untuk rasio yang sama. |
| Beban harus tetap pada posisinya saat motor mati. | Cacing (≥ 30:1) | Rem eksternal apa pun | Hanya cacingnya peredam gigi menyediakan penguncian otomatis tanpa perangkat rem bertenaga terpisah. |
| Output sudut siku-siku, sensitif terhadap biaya | Cacing | Kemiringan spiral | Worm menyediakan sudut siku-siku sebagai standar dengan biaya terendah; bevel menambah efisiensi dengan biaya lebih tinggi. |
| Efisiensi penggerak > 90% diperlukan (biaya energi sangat penting) | Spiral | Planet | Baik ulir cacing maupun ulir miring tidak secara konsisten mencapai >90% di semua rasio; ulir heliks mampu melakukannya. |
| Dua arah frekuensi tinggi (>100 start/jam) | Spiral | Planet | Siklus termal penggerak cacing pada frekuensi pembalikan tinggi mengurangi keunggulan masa pakainya. |
| Torsi maksimum dalam ukuran minimum. | Planet | Cacing (pada rasio tinggi) | Distribusi beban Planetary yang tersebar di beberapa planet memberikan kepadatan torsi maksimum per kg berat housing. |
| Penentuan posisi presisi dengan pengulangan ≤ 0,1° | Planet atau VRV030 AR | Penggerak harmonik | Reduksi roda gigi cacing standar dengan celah (0,24°) tidak memadai; VRV030 Kelas AR (0,066°) atau planetary diperlukan. |
| Lingkungan luar ruangan, basah, atau yang dapat dicuci (IP65+) | Worm (IP65/67) | Planetary stainless steel | Reducer roda gigi cacing tersedia dalam peringkat IP67 (seri XRV050); unit planetary dengan peringkat IP yang sebanding jauh lebih mahal. |
| Kecepatan keluaran sangat rendah (< 5 rpm) dari motor standar | Cacing (dua tahap) | Heliks multi-tahap | Worm dua tahap WPEX mencapai rasio ribuan:1 dalam satu housing — tanpa sambungan perantara. |
| Beban kejut tinggi dengan torsi keluaran tinggi (> 5.000 N·m) | Cacing heliks atau WP | Planet (ukuran besar) | Besi cor seri WP reduktor roda gigi cacing Mampu menangani beban kejut dengan baik karena kekakuan rumah (housing); bandingkan dengan tipe heliks-bevel pada torsi yang setara untuk aplikasi yang mengutamakan efisiensi. |

Tiga Kesalahpahaman Umum Tentang Pemilihan Jenis Reducer
Ketiga pernyataan ini sering muncul dalam diskusi pengadaan dan percakapan teknis. Masing-masing mengandung sebagian kebenaran yang menjadi menyesatkan jika diterapkan tanpa konteks lengkap.

“Reduksi Gigi Cacing Tidak Efisien — Seharusnya Diganti dengan Penggerak Heliks”
Kebenaran yang sebagian: Reducer roda gigi cacing kurang efisien dibandingkan reducer heliks pada rasio roda gigi yang sama. Pada rasio 80:1, penggerak cacing beroperasi pada efisiensi 60–70%; penggerak heliks pada rasio yang sama akan beroperasi pada efisiensi 87–92% di beberapa tahap.
Yang hilang: Penggerak heliks dengan rasio 80:1 membutuhkan tiga atau lebih tahap roda gigi, kopling poros perantara, dan minimal 40% panjang pemasangan lebih banyak daripada penggerak cacing. Jika output sudut siku-siku diperlukan, tahap bevel akan menambah panjang lebih lanjut. Sistem keseluruhan termasuk ukuran motor, kopling, dan struktur pemasangan biasanya menutup sebagian besar kesenjangan biaya energi jika dibandingkan selama siklus hidup 10 tahun penuh. Penggerak cacing memang kurang efisien, tetapi kesenjangan efisiensi tidak secara otomatis berarti penalti biaya yang membenarkan alternatif tersebut.
Pembingkaian yang tepat: Ketika biaya energi berkelanjutan menjadi kriteria pemilihan utama dan perbedaan efisiensi mewakili biaya operasional riil dalam skala besar, opsi heliks sepadan dengan harga premiumnya. Untuk sebagian besar aplikasi beban ringan hingga menengah, kesenjangan efisiensi merupakan faktor yang nyata namun tidak terlalu signifikan.
“Pengurang Skala Planet Lebih Presisi, Sehingga Selalu Lebih Baik untuk Otomatisasi”
Kebenaran yang sebagian: Reducer planet standar menghasilkan backlash yang lebih rendah daripada reducer roda gigi cacing standar — biasanya 3–8 menit busur dibandingkan 14–15 menit busur (0,24°) untuk cacing standar.
Yang hilang: Sebagian besar aplikasi otomatisasi memiliki toleransi posisi yang masih dalam batas kemampuan penggerak cacing standar. Meja pemosisian ulir timah dengan toleransi ±0,05 mm hanya mengalami kesalahan linier sebesar 0,003 mm akibat celah balik reduktor roda gigi cacing standar pada jarak ulir standar — dapat diabaikan. Reduktor planet juga sejajar — untuk aplikasi penggerak sudut siku-siku, menambahkan tahap bevel untuk mencapai output sudut siku-siku akan menambah biaya dan kompleksitas yang menghilangkan keunggulan nyata reduktor planet untuk geometri instalasi spesifik tersebut.
Pembingkaian yang tepat: Gunakan perhitungan backlash untuk menentukan apa yang sebenarnya dibutuhkan aplikasi. Jika perhitungan menunjukkan bahwa backlash cacing standar menghasilkan kesalahan posisi dalam batas toleransi, maka menentukan penggerak planet akan menambah biaya tanpa menambah kinerja. Jika perhitungan menunjukkan toleransinya ketat, cacing kelas presisi (VRV030 Kelas A atau AR) atau planet adalah pilihan yang tepat.
“Heliks Menggantikan Penggerak Cacing — Ini Tren Industri”
Kebenaran yang sebagian: Penggerak kombinasi heliks-bevel dan heliks-worm telah merebut pangsa pasar yang signifikan dalam aplikasi di mana generasi sebelumnya menggunakan penggerak worm murni. Dalam aplikasi konveyor dan mixer industri tugas berat, efisiensi dan keunggulan kebisingan dari penggerak heliks telah membuat peningkatan ekonomi menjadi menarik dalam skala besar.
Yang hilang: Karakteristik penguncian otomatis pada cacing peredam gigi Tidak ada padanannya pada penggerak heliks dengan rasio yang sama tanpa rem eksternal. Untuk kategori aplikasi yang bergantung pada penguncian otomatis—konveyor miring, kerekan, mekanisme penyesuaian—penggerak cacing tidak digantikan. Penggerak cacing adalah solusi mekanis yang tepat. Klaim bahwa penggerak heliks dapat menggantikan penggerak cacing dalam aplikasi penahan beban memerlukan identifikasi ke mana fungsi penahan tersebut berpindah, yang selalu berupa rem elektromagnetik (biaya tambahan, perawatan tambahan) atau desain ulang aplikasi.
Pembingkaian yang tepat: Pasar tidak menjauh dari drive tipe worm — melainkan memilah aplikasi dengan lebih tepat, dengan beberapa aplikasi kontinu berdaya tinggi beralih ke tipe heliks dan aplikasi pengunci otomatis tetap menggunakan tipe worm.
Di Luar Harga Pembelian: Total Biaya Kepemilikan Selama 10 Tahun
Harga beli reduktor biasanya berkisar antara 3–8% dari total biaya sistem penggerak selama masa pakai 10 tahun jika konsumsi energi disertakan. Perbandingan tersebut berubah secara substansial ketika Anda memperhitungkan semua elemen biaya:

Perhitungan Total Biaya Kepemilikan (TCO) 10 Tahun: Penggerak 2,2 kW, 8 jam/hari, 250 hari/tahun
Referensi biaya listrik: KRW 130/kWh (perkiraan tarif industri Korea). Aplikasi: penggerak sudut kanan, rasio 80:1 diperlukan, tidak memerlukan penguncian otomatis, lingkungan sedang.
| Elemen Biaya | Reducer Roda Gigi Cacing | Bevel Heliks | Catatan |
|---|---|---|---|
| Harga pembelian per unit | ~$200 | ~$420 | Gigi bevel heliks dengan keluaran sudut siku-siku, torsi setara |
| Efisiensi pada rasio 80:1 | ~72% | ~91% | Efisiensi gabungan tahap heliks multi-tahap + tahap bevel |
| Energi masukan tahunan | 6.111 kWh | 4.835 kWh | P_input = 2,2 kW / efisiensi × 8 jam × 250 hari |
| Biaya energi tahunan | ~$611 | ~$484 | Pada $0.10/kWh |
| Biaya energi selama 10 tahun | $6,110 | $4,840 | Helical menghemat $1.270 selama 10 tahun |
| Penggantian oli + perawatan (10 tahun) | ~$180 | ~$280 | Sistem pelumasan heliks membutuhkan penggantian oli lebih banyak (beberapa tahap). |
| Total Biaya Kepemilikan (TCO) selama 10 tahun | ~$6,490 | ~$5,540 | Keunggulan Helical: $950 selama lebih dari 10 tahun |
| Tambahkan kembali jika penguncian otomatis diperlukan: Heliks memerlukan rem elektromagnetik (~$180 unit + $120 perawatan) = $300 ditambahkan ke TCO heliks → selisih menyempit menjadi $650, atau 10% dari total TCO |
Penggerak bevel heliks adalah pilihan dengan TCO (Total Cost of Ownership) terendah dalam contoh ini, sekitar $950 selama 10 tahun — sekitar 15% dari total biaya siklus hidup. Ini adalah keuntungan nyata. Namun, keuntungan ini jauh lebih kecil daripada yang disarankan oleh perbandingan harga pembelian (harga satuan 2,1 kali lebih tinggi). Apakah keuntungan tersebut membenarkan pengeluaran modal yang lebih tinggi bergantung pada perlakuan akuntansi biaya modal versus biaya operasional proyek tersebut.
Untuk aplikasi sudut siku-siku yang membutuhkan penguncian otomatis — kombinasi umum di dunia nyata — opsi heliks-bevel memerlukan rem elektromagnetik, yang semakin mempersempit celah. Untuk aplikasi yang beroperasi lebih sedikit jam per hari, penghematan energi berkurang secara proporsional. reduktor roda gigi cacing Produk ini kompetitif dari segi biaya total kepemilikan (TCO) di sebagian besar aplikasi, bukan hanya kasus-kasus berbiaya rendah yang jelas. Angka spesifiknya sepenuhnya bergantung pada siklus kerja, biaya energi, dan apakah properti penguncian otomatis diperlukan.
Cara Mempresentasikan Pilihan Reducer Anda kepada Insinyur Desain
Insinyur pengadaan terkadang dihadapkan pada kebutuhan untuk membenarkan suatu hal. reduktor roda gigi cacing Pemilihan diserahkan kepada seorang insinyur desain yang cenderung memilih alternatif yang lebih mahal. Kerangka kerja berikut menempatkan percakapan pada ranah teknis, bukan preferensi:
Kerangka Kerja Justifikasi Seleksi Tiga Poin:
1. Tetapkan persyaratan, bukan preferensi. Nyatakan toleransi posisi sebenarnya, kecepatan keluaran yang dibutuhkan, dan apakah penguncian otomatis merupakan kebutuhan fungsional. “Aplikasi ini membutuhkan posisi ±2 mm, kecepatan keluaran 18 rpm, dan penahan beban tanpa rem.” Ini memisahkan persyaratan teknik sebenarnya dari asumsi kebutuhan akan jenis reduktor tertentu.
2. Tunjukkan perhitungannya, bukan kesimpulannya. “Reduksi roda gigi cacing standar pada rasio ini menghasilkan kesalahan posisi 0,024 mm pada sekrup penggerak — toleransinya adalah ±2 mm. Penguncian otomatis pada 40:1 mempertahankan posisi saat motor berhenti, sehingga menghilangkan kebutuhan akan rem penahan terpisah.” Pembenaran berbasis angka jauh lebih sulit untuk diabaikan hanya berdasarkan preferensi semata.
3. Sajikan perbandingan TCO (Total Cost of Ownership), bukan hanya harga satuan. Tunjukkan perhitungan 10 tahun — biaya per unit, energi, perawatan, dan komponen tambahan apa pun yang dibutuhkan alternatif tersebut (rem, adaptor, tahap tambahan). Ini mengubah diskusi "girboks yang lebih murah" menjadi percakapan biaya siklus hidup, yang merupakan kerangka teknis yang tepat.
Untuk aplikasi di mana data benar-benar mendukung tipe reducer yang berbeda — di mana efisiensi sangat penting, di mana backlash ketat, di mana kepadatan daya menjadi kendala — kerangka kerja yang sama akan secara tepat mengarah ke alternatif tersebut. Tujuannya selalu untuk mencocokkan drive dengan aplikasi, bukan untuk mempertahankan preferensi. Sebagai seorang spesialis produsen reduktor roda gigi cacingKami mendukung pelanggan dengan data pemilihan dan perhitungan untuk perbandingan, termasuk kasus di mana jenis penggerak alternatif lebih cocok untuk aplikasi tertentu. Telusuri rangkaian reduktor roda gigi cacing kami untuk spesifikasi dan data dimensi.
Pertanyaan yang Sering Diajukan — Perbandingan Jenis Reducer
Bisakah reduktor roda gigi heliks sepenuhnya menggantikan reduktor roda gigi cacing dalam aplikasi konveyor miring?
Pada tingkat daya kontinu berapa perbedaan efisiensi antara ulir cacing dan ulir heliks menjadi signifikan?
Apakah reduktor roda gigi bevel merupakan pilihan sudut siku-siku yang lebih baik daripada reduktor roda gigi cacing?
Mengapa pabrik pengolahan makanan sering menggunakan reduktor roda gigi cacing meskipun efisiensinya lebih rendah?
Kisaran rasio berapa yang merupakan "titik optimal" untuk reduktor roda gigi cacing dibandingkan dengan pesaingnya?
Bisakah reduktor roda gigi cacing dan reduktor heliks digabungkan dalam satu penggerak?
Butuh Rekomendasi Tipe Reducer untuk Aplikasi Spesifik Anda?
Bagikan persyaratan kecepatan output, torsi, efisiensi aplikasi Anda, dan apakah diperlukan output pengunci otomatis atau sudut siku-siku. Kami akan mengkonfirmasi jenis reduktor mana — termasuk kasus di mana solusi heliks atau kombinasi lebih sesuai — yang cocok untuk aplikasi Anda dan memberikan data perbandingan untuk mendukung keputusan pemilihan.
Editor: Cxm

























