Šnekový převod VRV030 | Náhrada za Ondrives Rino P15, IP67

VRV030 precision worm gearbox, weight 0.15 kg, max input speed 3,000 rpm, grease-lubricated with Shell Gadus S5. Six ratios from 6.666:1 to 80:1. Three backlash accuracy classes — standard (≤0.50°), A (≤0.13°), AR (≤0.066°) — with full efficiency and reflected inertia data per ratio. Dimensionally compatible replacement for Ondrives & Rino P15 series.
VRV030 Precision Worm Gear Reducer
The VRV030 is a miniature precision šnekový reduktor built for high-precision, space-constrained drives in industrial robotics, solar tracking systems, and military equipment. Weighing 0.15 kg in its smallest form, the unit accepts input speeds up to 3,000 rpm and is grease-lubricated with Shell Gadus S5 V4P 2.5 as standard — eliminating the oil-level management that oil-bath units require in orientations where the mesh would be intermittently exposed.
Three backlash accuracy classes are available for each ratio: standard (output backlash ≤0.50°), A class (≤0.13°), and AR class (≤0.066°). This three-tier system matches the precision requirement directly to the part cost — a solar panel positioning drive tolerating 0.30° of play can use the standard class; a robotic arm requiring repeatable micro-positioning should specify class AR. The full backlash, efficiency, and reflected inertia data for each ratio and class is tabulated below.
The VRV030 is a dimensionally compatible replacement for the Ondrives & Rino P15 worm gear reducer series. Korea Ever-Power produces the VRV030 as an aftermarket alternative — not as an OEM part. For original Ondrives & Rino components, contact the original manufacturer. For a cost-competitive compatible replacement with the same performance data, the VRV030 is a direct drop-in.
Technické specifikace
The specification table below covers the mechanical, lubrication, and load parameters that apply across all VRV030 variants. The ratio/efficiency/inertia table that follows gives per-ratio performance data for each backlash class — use both when verifying suitability and writing your purchase specification.
| Specifikace | Value |
|---|---|
| Hmotnost | 0.15 kg (P15 frame) |
| Nom. Input Speed [S1 T₂n] n1nom | 1,000 min⁻¹ (r/min) |
| Max. Input Speed n1max | 3,000 min⁻¹ (r/min) |
| Mazání | Grease — Shell Gadus S5 V4P 2.5 |
| Max. Operating Temperature | ≈ 60°C |
| Max. Input Radial Load Fr1 | 10 N |
| Max. Output Radial Load Fr2 | 80 N |
| Max. Output Axial Load Fa2 | 30 N |
P15 Series Ratio, Efficiency, Backlash & Inertia Table
Part number suffixes: standard = output backlash ≤0.50°; A = ≤0.13° (reduced backlash); AR = ≤0.066° (precision backlash). Efficiency (ηz) measured at nominal input speed. Reflected inertia at input in kg·m². All lead directions: Right Hand.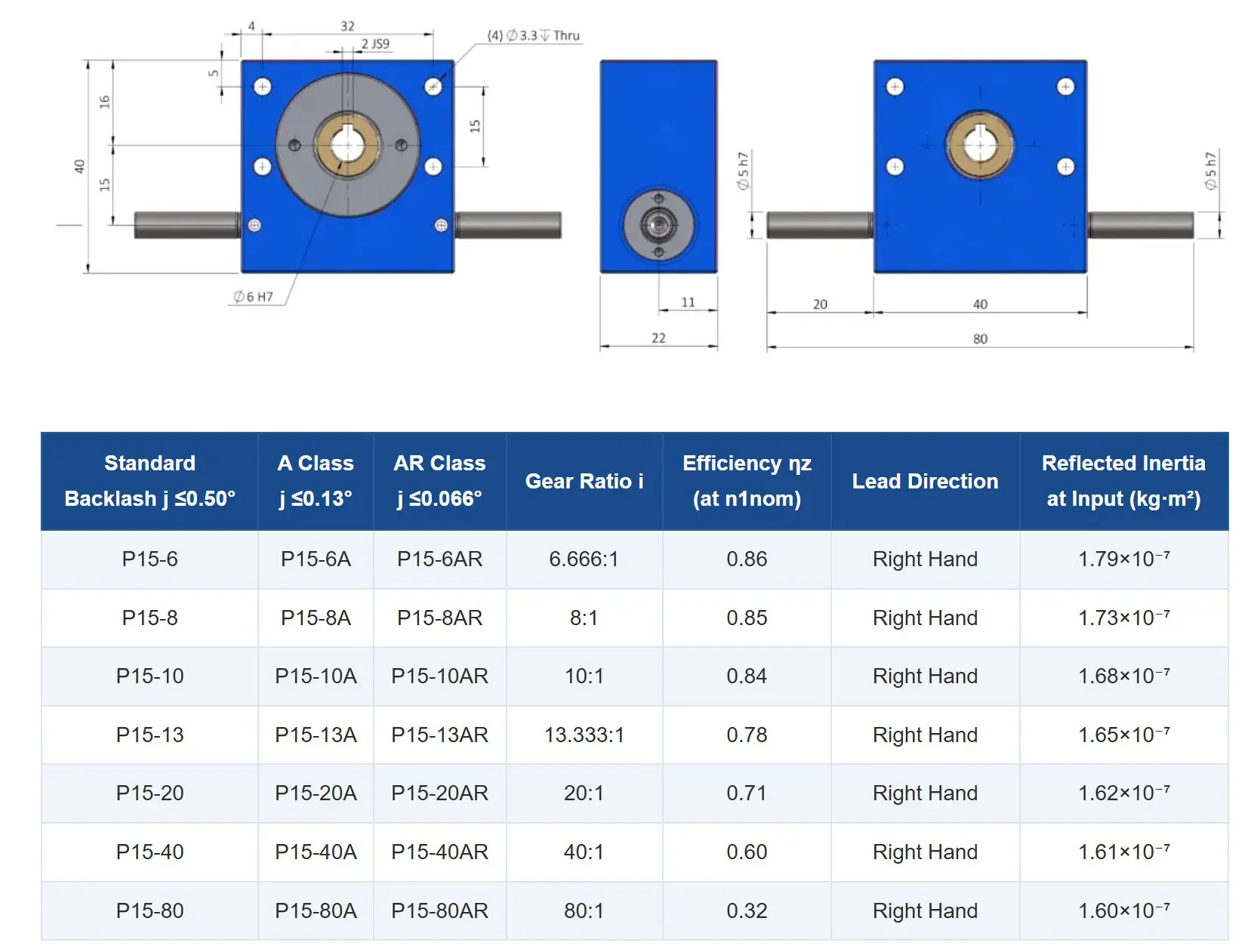
Note: Testing in your application is necessary. Confirm duty cycles and suitability with your own calculations. Values listed are for guidance only. Cooling may be required depending on application duty cycle and ambient temperature.
Selecting the Right Backlash Class
Backlash in a worm gear is the angular play at the output shaft when the input shaft is held stationary. Lower backlash means more positional repeatability on reversal — but it also means tighter manufacturing tolerances, shorter break-in periods, and a higher unit cost. Specifying a class tighter than your application actually requires is an unnecessary expense; specifying too loose creates position errors that control systems have to compensate for electronically.
| Class | Backlash at Output | Typical Application | Relative Cost |
|---|---|---|---|
| Norma | ≤ 0.50° | Single-direction drives; solar trackers that do not reverse under load; conveyor indexing with position feedback correction | Nejnižší |
| A | ≤ 0.13° | Robotic arm joints requiring repeatable positioning on reversal; antenna pointing drives; precision industrial dosing | Střední |
| AR | ≤ 0,066° | High-precision robotic arms; military optical systems; telescope azimuth drives; micro-dispensing and inspection equipment | Nejvyšší |
As a practical guide: if your servo controller compensates for backlash electronically and you are driving in one predominant direction, the Standard class is usually sufficient. If you require true mechanical positioning repeatability on direction reversal — as in a robotic joint that returns to a datum — specify class A or AR depending on your angular error budget. The efficiency figures in the table show that tighter classes do not significantly reduce output efficiency (compare 0.86 at 6.666:1 standard vs the same value at class AR) — the efficiency difference at the same ratio between classes is negligible.
Design Strengths of the VRV030

✦ Three Backlash Classes — Match Precision to Budget
Standard, A, and AR classes cover the full precision range from general positioning to high-accuracy robotics in the same housing. Selecting the right class avoids over-specifying precision where not needed and under-specifying where it matters.
✦ Grease Lubrication — Orientation-Independent
Shell Gadus S5 grease lubrication means no oil level to manage and no oil-position orientation constraints. The VRV030 can be mounted in any attitude — horizontal, vertical, inverted, or angled — without oil pool displacement concerns. Critical for robotic arm joints that rotate through arbitrary orientations.
✦ 3,000 rpm Max Input — High-Speed Servo Compatible
The 3,000 rpm maximum input speed is compatible with direct servo motor coupling without a primary reduction stage. A brushless DC servo running at 2,000 rpm with a 20:1 VRV030 delivers 100 rpm output — a common configuration in robotic joint and solar panel tilt drives.
✦ One-Piece Cast Housing — Alignment Integral
The one-piece moulded housing maintains worm-to-wheel alignment without requiring shimming or external alignment fixtures. This is the same design principle used in high-end precision gearboxes at a fraction of the cost — the bore-in-one-setup method guarantees shaft parallelism and bearing seat concentricity within the housing casting tolerances.
✦ Efficiency Data Published Per Ratio
Many miniature gearbox suppliers publish a single efficiency figure for the range. The VRV030 table lists measured efficiency for every ratio — from 0.86 at 6.666:1 down to 0.32 at 80:1. This matters for motor thermal sizing: a servo at 80:1 must supply 3× the input power for the same output work compared to the 6.666:1 configuration.
✦ Reflected Inertia Data — Servo Tuning Reference
The reflected inertia at input (approximately 1.60–1.79 × 10⁻⁷ kg·m²) is published for each ratio. This figure is essential for servo motor gain tuning — the control engineer needs to know how much load inertia the motor sees at its shaft, which is the load inertia ÷ ratio² plus the gearbox reflected inertia. For high-speed servo loops, this distinction matters.
Primary Applications
▸ Industrial Robotics — Joint and End-Effector Drives

Robotic arm wrist joints, tool change actuators, and part manipulation drives commonly require compact, high-torque gearing in arbitrary orientations. The VRV030's grease lubrication handles any mounting angle; its 3,000 rpm input speed and three backlash classes cover both high-speed sweep motions (lower ratio, Standard class) and precision positioning joints (higher ratio, A or AR class). At 20:1 with efficiency 0.71, a 50W servo motor delivers approximately 35W of output mechanical power — adequate for a compact gripper or wrist actuator in a handling robot.
▸ Solar Energy — Panel Tracking and Azimuth Drives

Single-axis and dual-axis solar trackers require precise panel angle adjustment in both elevation and azimuth. The drive must hold panel position under wind loading when not being commanded — at ratios of 20:1 and above, the VRV030 is self-locking (the 20:1 efficiency of 0.71 is above the self-locking threshold, but at 40:1 with efficiency 0.60 and 80:1 with efficiency 0.32, practical self-locking applies). Standard backlash class is typically sufficient for solar tracking — the panel angle tolerance of most PV systems is several times wider than the 0.50° standard backlash figure.
▸ Military, Surveillance & Precision Optical Equipment
Unmanned vehicle steering actuators, antenna pointing mechanisms, and electro-optical sensor positioning systems require both compactness and precise, repeatable angular positioning. The VRV030 AR class at 10:1 or 13.333:1 — with backlash under 0.066° — provides this within a 0.15 kg housing. The published reflected inertia allows servo drive engineers to model system dynamics accurately during control loop design, which is a requirement for the verification documentation that military equipment procurement typically demands.
Ondrives & Rino P15 Replacement Guide
The VRV030 is produced as a compatible aftermarket replacement for the Ondrives & Rino P15 worm gear reducer. Korea Ever-Power is not affiliated with or authorised by Ondrives & Rino — the VRV030 is an independent product designed to be dimensionally and performance-compatible as a drop-in replacement. For original Ondrives & Rino components, contact the manufacturer.
| Check Point | Ondrives & Rino P15 | VRV030 | Compatible? |
|---|---|---|---|
| Product series / frame | P15 | VRV030 | ✓ Same frame class |
| Available ratios | 6.666, 8, 10, 13.333, 20, 40, 80 | 6.666, 8, 10, 13.333, 20, 40, 80 | ✓ Full match |
| Backlash classes | Standard / A / AR | Standard / A / AR | ✓ Full match |
| Nom. input speed | 1,000 rpm | 1,000 rpm | ✓ Match |
| Max. input speed | 3 000 ot/min | 3 000 ot/min | ✓ Match |
| Mazání | Grease | Shell Gadus S5 V4P 2.5 | ✓ Compatible grade |
| Max. output radial load Fr2 | 80 N | 80 N | ✓ Match |
| OEM / aftermarket | Original manufacturer part | Aftermarket replacement | — Verify for your application |
We recommend testing the VRV030 in your specific application before committing to a fleet replacement. Dimensional drawings and full specifications are available on request via Korea Ever-Power to confirm fitment before your first order.
Shodné komponenty pohonu
The VRV030 gearbox is one component in a precision drive assembly. Worm wheel wear characteristics, worm shaft precision grade, and motor coupling type all affect the system's long-term positioning accuracy. Korea Ever-Power supplies the full component set for this gearbox family.

⚙ Šnekové kolo — červčervové kolo.top
Precision worm wheels for the VRV030 frame, manufactured to match the centre distance and tooth profile of the standard, A, and AR backlash classes. Supply the ratio and backlash class when inquiring — we confirm the profile and surface finish specification that determines which class the replacement wheel qualifies for.
⚙ Šneková hřídel — šnekové kolo.horní
Ground worm shafts to the tolerance class required for the A or AR backlash specification. Precision grinding to DIN 3974 at the appropriate accuracy class determines the final backlash grade — tighter profile accuracy on the worm shaft is one of the two primary levers (alongside wheel profile accuracy) for achieving the AR class.
⚙ Hřídelové spojky
For precision servo drives via the VRV030, zero-backlash beam or bellows couplings are the standard input-side connection between the servo motor shaft and the gearbox input bore. Jaw couplings with standard polyurethane spiders should be avoided in AR-class applications — the spider compliance adds angular play that undermines the backlash advantage of the precision gear class.
Často kladené otázky
How do I choose between Standard, A, and AR backlash classes?
→ Identify your application's angular error budget for a single positioning move followed by reversal. If your system can tolerate up to 0.5° of dead zone on direction change (managed by the controller), Standard class is sufficient. For mechanical repeatability within 0.13° without controller compensation, specify class A. For AR, the backlash is tight enough that most servo controllers can track through direction reversal within their normal position loop gain — specify AR for telescope, precision optical, and high-accuracy robotic joints.
Is the VRV030 truly self-locking and which ratios qualify?
→ At 40:1 (efficiency 0.60) and 80:1 (efficiency 0.32) the VRV030 is effectively self-locking under static conditions — the lead angle is below the friction angle of the grease-lubricated mesh. At 20:1 (efficiency 0.71) and below, back-driving is possible under sufficient output load. For solar and antenna positioning drives that must hold position under wind load, specify 40:1 or 80:1. Always verify self-locking in your specific application — operating temperature, lubrication condition, and vibration can all affect the friction angle in practice.
What is the maximum output torque at the 10:1 ratio?
→ The maximum output torque depends on the motor power at the input. The VRV030 at 10:1 has an efficiency of 0.84, so output torque = (input power × efficiency × 60) ÷ (2π × output speed in rpm). At 1,000 rpm nominal input with a 10W motor: output torque ≈ (10W × 0.84 × 60) ÷ (2π × 100 rpm) ≈ 0.8 Nm. The maximum continuous output torque is constrained by the housing thermal limit and the maximum output radial load Fr2 = 80 N — confirm your load combination does not exceed both limits simultaneously.
Can the VRV030 run at 3,000 rpm input continuously?
→ 3,000 rpm is the rated maximum input speed, not a continuous duty rating at full load. At 3,000 rpm the grease lubrication film must be verified adequate for the input shaft bearing conditions. For continuous duty above 2,000 rpm, confirm with Korea Ever-Power that your specific duty cycle and load combination are within the thermal and lubrication limits of the grease fill.
Does the VRV030 require a separate motor coupling or can I mount the motor directly?
→ The VRV030 accepts a servo or stepper motor shaft directly into the input bore — there is no motor flange face on this unit. A coupling between the motor shaft and the gearbox input bore is required. For precision AR-class applications, use a zero-backlash beam or bellows coupling. For Standard and A-class applications, a standard jaw coupling with a soft polyurethane spider is acceptable, but be aware that the spider adds a small amount of angular compliance that contributes to the effective system backlash.
Does the reflected inertia figure change between Standard and AR class units?
→ No. The reflected inertia is a function of the gear geometry (tooth count, centre distance, material) which does not change between backlash classes. The 1.60–1.79 × 10⁻⁷ kg·m² values in the table apply to all three classes at the same ratio. The class distinction affects only the manufacturing tolerance of the gear mesh, not the physical mass distribution of the rotating components.
Co říkají zákazníci
Kim Hyun-woo, Robotics Engineer, Seoul Automation Systems (2024)
"Replaced Ondrives P15-20A units on a handling robot wrist joint. The VRV030-20A backlash tested at 0.11° — within the ≤0.13° A-class spec. Servo loop behaviour after replacement was identical to the original. Saved 40% on unit cost compared to the OEM part."
Park Sang-il, Mechanical Engineer, Daejeon Solar Equipment OEM (Q3 2024)
"We use the VRV030 at 40:1 standard class on our single-axis solar tracker azimuth drives. The 0.60 efficiency at that ratio means the motor sizes up a little vs a helical gearbox, but the self-locking behaviour at 40:1 removes the need for a separate brake and simplifies the electrical system. Running 180 units in the field with no gearbox failures in 18 months."
Choi Byung-jun, Controls Engineer, Busan Defence Systems Integrator (2025)
"Specified AR class for an antenna pointing application. Measured backlash of 0.05° on the first batch — better than the ≤0.066° spec. The reflected inertia data in the specification was critical for our servo commissioning documentation. Product was delivered with full dimensional certification."
Lee Jun-seok, Procurement Engineer, Gyeonggi-do Precision Equipment Co. (Q4 2024)
"The efficiency table per ratio was what convinced us to try this supplier. Very few worm gearbox vendors publish per-ratio efficiency data at this scale. The 0.32 efficiency at 80:1 is exactly what we needed for thermal budgeting on our servo drive system."
Yoon Gi-tae, Automation Integrator, Incheon (2024)
"Used VRV030 at 13.333:1 A-class for a dispensing machine positioning axis. The grease lubrication is a practical advantage — no oil level concerns when the machine is re-oriented for different product formats. The replacement cost vs OEM was compelling enough to qualify and approve within one product cycle."
Han Soo-yeon, Technical Buyer, Seoul Research Equipment Supplier (late 2024)
"Ordered 8:1 standard class for a microscope stage drive — not a typical robotics or solar application but the compact size and smooth motion were exactly what we needed. Delivery was 5 business days. No issues after 8 months of lab use."
Další informace
| Editor | Cxm |
|---|
Související produkty
-

Šnekový převodový stupeň EP-NRV s vstupem do hřídele | Vstup s plným hřídelem
-

Šnekový reduktor WPWDKO | Dvojitá klínovaná hřídel + vertikální výstup
-

Vertikální šnekový převod WPWKO | Výstup hřídelí dolů
-

Šnekový převod VRV030 | Náhrada pro Ondrives Rino P70
-

Šneková převodovka WPWDK | Řada WP
-

Šnekový převod VRV030 | Náhrada pro Ondrives Rino P45
-

Šnekový převod EP-NMRV s výstupní přírubou
-

Šnekový převodový reduktor / synchronní šnekový převodový motor řady RV pro šroubový zvedák

























