VRV030 Червячен редуктор | Резервна част за Ondrives Rino P45

VRV030 medium-frame worm gearbox, 1.7 kg, max output radial load Fr2=450 N, axial load Fa2=300 N. Ratios 10–120:1, including 120:1 for high-reduction self-locking drives. Three backlash classes standard (≤0.50°), A (≤0.13°), AR (≤0.066°), with efficiency and reflected inertia per ratio. Compatible replacement for Ondrives & Rino P45 series.
VRV030 Medium-Frame Worm Gear Reducer
The VRV030 P45 is a medium-frame precision червячен редуктор in the VRV030 family, positioned between the lightweight P15 (0.15 kg, Fr2=80 N) and the heavy P70 (6.4 kg, Fr2=800 N). At 1.7 kg with a maximum output radial load of 450 N and output axial load of 300 N, it handles medium-payload robotic joints, mid-size solar tracker azimuth drives, and precision automation actuators where the P15 is undersized but the P70 would add unnecessary weight and cost.
The ratio range extends further than the P15: the P45 covers 10:1 through 120:1, adding the 120:1 high-reduction step that is absent from the smaller frame. At 120:1, the efficiency drops to 47%, which combined with the standard single-start worm geometry provides strong self-locking — a useful property for vertical actuators and positioning drives that need to hold their position when power is removed without a separate holding brake.
Three backlash classes are available for every ratio: standard (≤0.50°), A (≤0.13°), and AR (≤0.066°). Grease lubrication with Shell Gadus S5 V4P 2.5 is standard throughout, making the unit orientation-independent. The VRV030 P45 is a compatible replacement for the Ondrives & Rino P45 worm gear reducer — produced by Korea Ever-Power as an aftermarket alternative, not as an OEM part.
Technical Specifications — VRV030 P45
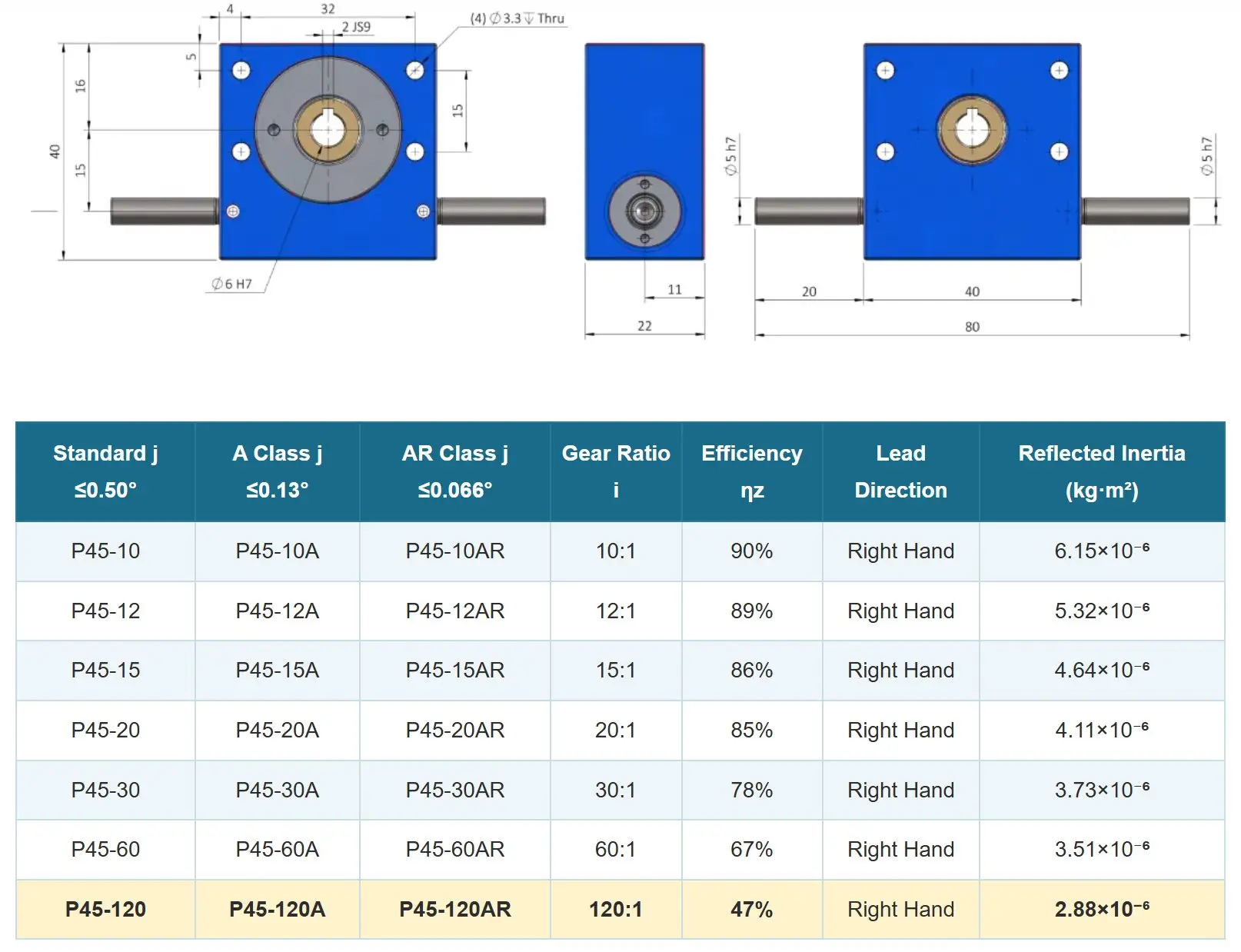
P45 Series — Ratio, Efficiency, Backlash & Inertia Table
Суфикси на номера на частите: стандарт = backlash ≤0.50°; А = ≤0.13°; Допълнена реалност = ≤0.066°. Efficiency (ηz) at nominal input speed 1,000 rpm. Reflected inertia at input in kg·m². All directions: Right Hand.
Note: Testing in your application is necessary. Confirm duty cycles and suitability with your own calculations. Values are for guidance only. Cooling may be needed at higher duty cycles.
Ratio and Backlash Class Selection Guide
Ratio Selection — Output Speed vs Self-Locking
At 1,000 rpm nominal input, the P45 output speed ranges from 100 rpm at 10:1 down to 8.3 rpm at 120:1. The practical self-locking threshold for worm gears lubricated with Shell Gadus S5 is approximately 40–50:1 under static conditions for this frame size. The 47% efficiency at 120:1 confirms the worm lead angle is well below the friction angle — this is the strongest self-locking ratio in the P45 range, suitable for vertical loads that must hold position without power.
For solar tracker azimuth drives where the panel is held in position between adjustments, the 30:1 (78% efficiency) or 60:1 (67% efficiency) ratios offer the best balance: strong enough self-locking to hold position under moderate wind load, but efficient enough that the servo or stepper motor does not need to be significantly oversized to overcome the worm gear back-drive resistance during moves.
For servo-driven robotic joints where back-drivability is preferred (for safe robot stopping), select 10:1 or 12:1 — efficiency 90%/89% at these ratios means the load can back-drive the input shaft if power is cut, which is the fail-safe behaviour in many collaborative robot designs. If you need to prevent back-driving in a robotic system for safety reasons, select 30:1 or above and confirm your motion controller handles the transition into the self-locking range.
Backlash Class Comparison
| Клас | Негативна реакция | Best for | Бележки |
|---|---|---|---|
| Стандартен | ≤ 0,50° | Solar trackers, single-direction conveyor drives, position feedback-corrected axes | Lowest cost; adequate where electronic position compensation is available |
| А | ≤ 0,13° | Robotic wrist joints, antenna pointing, automation axes requiring reversal positioning | Standard choice for P45 applications in collaborative and industrial robots |
| Допълнена реалност | ≤ 0,066° | Telescope drives, EO/IR sensor gimbals, precision pick-and-place, medical robotics | Highest cost; backlash tight enough for most servo loops to track through reversal without compensation |
P45 vs P15 — When the Larger Frame is the Right Choice
✦ 5.6× Higher Output Radial Load Capacity
P45 Fr2=450 N vs P15 Fr2=80 N. A robotic arm link with even a modest end-effector load creates significant radial force on the output shaft — particularly if the shaft mounting is offset from the gearbox centreline. The P15 runs out of Fr2 headroom faster than most medium-payload robot builders expect.
✦ 120:1 Ratio — Not Available in P15
The P15 tops out at 80:1. The P45's 120:1 delivers 8.3 rpm output at 1,000 rpm nominal input — useful for very slow positioning drives, gate actuators, and stage machinery where a single-stage worm unit at 120:1 is neater than a compound two-stage arrangement.
✦ 34× Higher Reflected Inertia — Tuning Implication
The reflected inertia at input is approximately 6.15×10⁻⁶ kg·m² (P45 at 10:1) vs 1.68×10⁻⁷ (P15 at 10:1) — a 37× difference. If you are substituting P45 for P15 on a servo axis, the servo gain parameters will need to be retuned to account for the much higher reflected gear inertia seen by the motor.
✦ 6× Higher Input Radial Load Fr1
P45 Fr1=60 N vs P15 Fr1=10 N. For belt-driven or pulley-coupled inputs where the coupling itself generates a radial load on the input shaft, the P45 provides six times more margin. The P15's 10 N Fr1 limit essentially restricts input connections to direct shaft couplings with near-perfect alignment.
✦ Higher Efficiency at 10:1 — 90% vs 86%
The P45 achieves 90% efficiency at 10:1 — better than the P15's 86% at the same ratio. The larger centre distance in the P45 frame allows a larger worm lead angle at 10:1, which is the primary driver of higher efficiency in worm gear design. For power-sensitive battery-operated or solar-powered drives, this 4-point improvement is meaningful.
✦ Grease Lubrication — Any Orientation
Shell Gadus S5 grease lubrication in the P45 — same as P15 — means no oil level management and no orientation constraints. Robotic joints that rotate through arbitrary angles, solar panel tilting drives, and gimbal mechanisms all benefit from orientation-independent lubrication without the design constraints that oil-bath units impose.
Основни приложения
▸ Medium-Payload Industrial Robotics

Medium-payload collaborative robots (3–10 kg payload class) and industrial SCARA arms use wrist and elbow joint actuators in the 1–5 kg mass range. The P45 at 10:1 or 15:1 with class A backlash is a common specification in this segment — back-drivable (efficiency 86–90%), precision enough for servo positioning without electronic backlash compensation, and physically compact enough for a humanoid-scale wrist joint. The 450 N Fr2 limit comfortably handles a 2 kg end-effector at 0.3 m offset from the output shaft (generating approximately 60 N of radial force at full rated acceleration), with significant safety margin.
▸ Solar Tracking & Outdoor Precision Positioning

Single-axis solar trackers with panel widths from 1 to 3 m experience wind-induced torques that can exceed what a P15 output shaft bearing can sustain. The P45's 450 N Fr2 and 300 N Fa2 limits provide adequate safety margin for mid-size residential and commercial rooftop solar tracker installations. At 30:1 (78% efficiency), the self-locking is sufficient for most wind load conditions; at 60:1 (67%), the hold is very firm without a brake. Both ratios are standard in the P45 catalogue. The grease lubrication means no oil level management on roof or pole-mounted installations.
▸ Stage Machinery, Gate Actuators & Precision Automation
Stage rigging winches, automatic gate actuators, and security barrier drives in the 200–800 W motor power class often require the 60:1–120:1 ratio range to achieve slow, controlled output speeds from standard induction or brushless motors. The 47% efficiency of the P45 at 120:1 is the mechanism that provides the self-locking hold — the output shaft will not back-drive under static load, which is the primary safety requirement for these applications. Combined with class A or AR backlash, the P45 at 120:1 provides both precision and hold without a separate electromagnetic brake.
Ondrives & Rino P45 Replacement Compatibility
The VRV030 P45 is produced as an aftermarket-compatible replacement for the Ondrives & Rino P45 worm gear reducer. Korea Ever-Power is not affiliated with Ondrives & Rino — the VRV030 is an independent product designed to the same dimensional and performance specification. For original Ondrives & Rino components, contact the manufacturer directly.
| Параметър | Ondrives & Rino P45 | VRV030 P45 | Status |
|---|---|---|---|
| Налични съотношения | 10, 12, 15, 20, 30, 60, 120 | 10, 12, 15, 20, 30, 60, 120 | ✓ Пълно съвпадение |
| Класове за обратна реакция | Стандартен / A / AR | Стандартен / A / AR | ✓ Пълно съвпадение |
| Максимално изходно радиално натоварване Fr2 | 450 N | 450 N | ✓ Съвпадение |
| Номинална входна скорост | 1000 об/мин | 1000 об/мин | ✓ Съвпадение |
| Максимална входна скорост | 3000 об/мин | 3000 об/мин | ✓ Съвпадение |
| Смазване | Мазнина | Shell Gadus S5 V4P 2.5 | ✓ Съвместим клас |
| OEM / резервни части | Original manufacturer | Подмяна на резервни части | — Verify in application |
Dimensional drawings and full test specifications are available on request via Корея Евър-Пауър. We recommend sample testing before committing to a fleet replacement program.
Съвпадащи компоненти на задвижването
At the P45 load level, correct coupling selection at both input and output shafts becomes more important than at the P15 level — the higher Fr1 and Fr2 limits mean the gearbox can sustain more coupling-induced loads, but incorrect coupling type still represents a common cause of premature bearing failure in precision servo drives.

⚙ Червячно колело — червейчервейколело.топ
Precision worm wheels for the P45 frame, in bronze alloy grade and profile class matching the original. Provide ratio and backlash class at inquiry — the gear tooth surface finish specification changes between Standard, A, and AR classes. Replacement wheels are available for all 7 P45 standard ratios.
⚙ Червячен вал — червячно зъбно колело.горен край
Precision ground worm shafts for P45 frame, 20CrMnTi carburised, DIN 3974 accuracy class matching the specified backlash grade. Available for all P45 ratios. For AR-class units, the worm shaft profile accuracy is one of the two primary contributors to achieving sub-0.066° backlash.
⚙ Съединители на вала
For AR-class P45 applications, zero-backlash bellows or beam couplings at the input are recommended — jaw couplings add angular play that degrades the effective system backlash. For Standard and A-class applications, jaw couplings with hardened polyurethane spiders are acceptable. At the P45 output torque level, contact us with shaft diameters and peak torque for a confirmed coupling specification.
Често задавани въпроси
What output speed does the P45-120 deliver at 1,000 rpm input?
→ 1,000 ÷ 120 = 8.33 rpm. At 1,500 rpm (6-pole motor at 50 Hz), 12.5 rpm. The 120:1 is the slowest output ratio in the P45 catalogue and is primarily used for very slow actuators — stage rigging, gate drives, and vertical positioning mechanisms — where the self-locking hold at 47% efficiency is the deciding specification.
How does P45 efficiency at 10:1 (90%) compare to the P15 at 6.666:1 (86%)?
→ The P45 achieves 90% at 10:1 because its larger frame allows a larger worm diameter, which in turn allows a higher lead angle at this ratio — and higher lead angle directly reduces worm gear sliding losses. The P15 at its closest ratio (6.666:1) achieves 86% due to the smaller frame geometry. If you are comparing these two frames for a 10:1 application, the P45 is more efficient but substantially heavier and more expensive. The 4-point efficiency gain only matters in continuous duty at significant power levels.
Is the 120:1 ratio safe for continuous duty or only intermittent use?
→ The 47% efficiency at 120:1 means that 53% of the input power is dissipated as heat in the gear mesh. For a 50W motor input, that is 26W of heat generation — manageable for intermittent duty in a free-air-cooled unit. For continuous duty at 120:1 with a significant motor power, calculate the thermal load and verify that the housing surface temperature does not exceed the maximum operating temperature of the Shell Gadus S5 grease. Cooling fans or extended housings may be needed above 30W continuous heat generation.
Can I drive the P45 with a brushless DC motor at 2,500 rpm?
→ The maximum input speed is 3,000 rpm, so 2,500 rpm is within the rated limit. At 2,500 rpm input, the grease lubrication film must be adequate for the input bearing conditions at that speed. For continuous duty above 2,000 rpm at significant load, confirm with Korea Ever-Power that the specific duty cycle is within the thermal and lubrication limits for this frame. The input radial load limit Fr1=60 N must not be exceeded at the input shaft by belt tension or coupling-induced loads at any speed.
If I order AR class, what is the actual measured backlash likely to be?
→ AR class guarantees ≤0.066° as the maximum. In practice, well-manufactured AR-class units from a controlled production process typically measure 0.04–0.06°. We cannot guarantee a specific lower bound, only the upper limit per the backlash class definition. If your application requires a specific measured value for documentation purposes, request a measurement certificate with the order — we can provide measured backlash values for each unit supplied.
Какво казват клиентите
Kim Hyun-soo, Robotics Engineer, Seoul Collaborative Robot OEM (2024)
"Used P45-15A for wrist joints on a 5 kg payload cobot. The 86% efficiency at 15:1 allows the arm to be back-driven manually for programming — important for our collaborative application. Measured backlash was 0.09° on 6 units, all within the A-class spec. Drop-in replacement for P45 OEM units with a 38% cost saving."
Park Ji-won, Automation Engineer, Daejeon Precision Equipment Maker (Q4 2024)
"P45-120AR for a precision vertical actuator on an inspection machine. The self-locking at 120:1 holds the probe at fixed z-height when servo power is removed between measurements. AR class backlash lets us achieve 0.05° repeatability without any electronic compensation. Nine months in service, no issues."
Choi Dae-jin, Mechanical Engineer, Gyeonggi-do Solar Equipment Supplier (2025)
"Switched from P15 to P45 standard class for mid-size solar tracker tilt axis after calculating that the P15 Fr2 was insufficient for our 2m panel width at max wind load. The P45 at 30:1 holds the panel firmly against wind gusts without any supplementary brake. No failures in 85 units deployed over 14 months."
Lee Seong-min, Controls Engineer, Busan Stage Equipment Integrator (late 2024)
"P45-60 standard class for a motorized scenic piece drive on a theatre stage. The 67% efficiency gives useful self-locking for the scenic hold position, and the 23.3 rpm output at 1,400 rpm motor input suits our move speed. Compact size fits within the scenic unit frame without modification."
Yoon Hyeong-jun, Product Development Engineer, Incheon Automation Systems (Q1 2025)
"The reflected inertia data per ratio was critical for our servo sizing calculations. Very few suppliers for compact worm gearboxes at this price point provide this. The 6.15×10⁻⁶ kg·m² figure at 10:1 was accurate — our servo tuning matched the simulation closely on first commissioning."
Допълнителна информация
| Редактор | Cxm |
|---|
Свързани продукти
-

EP-NRV Червячен редуктор с входен вал | Вход с плътен вал
-

WPWDKO Червячен редуктор | Двоен шпонков вал + вертикален изход
-

WPWKO вертикален вал червячен редуктор | Изход с вал надолу
-

WPEX Двустепенен червячен редуктор | Двустепенно задвижване
-

EP-NMRV-VS Червячен редуктор с двоен вход | Удължител за синхронизирано задвижване и енкодер
-

Червячна скоростна кутия WPWDK | Серия WP
-

VRV030 Червячен редуктор | Ondrives Rino P15 Замяна, IP67
-

XRV050 Червячен редуктор | IP67 Клане и промиване

























